 |
Главная |


Расчёт трёхшарнирной арки, статически определимой плоской рамы и комбинированной системы
|
 2.4.1. Общие сведения
2.4.1. Общие сведения

 Трёхшарнирной называется плоская геометрически неизменяемая система, состоящая из трёх дисков, попарно соединённых тремя шарнирами.
Трёхшарнирной называется плоская геометрически неизменяемая система, состоящая из трёх дисков, попарно соединённых тремя шарнирами.
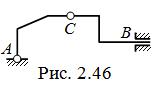
Как правило, шарниры в трёхшарнирной системе ( ТШС ) – цилиндрические ( в дальнейшем рассматриваются исключительно такие системы ), но могут присутствовать и поступательные шарниры ( рис. 2.46 ) .
Три цилиндрических шарнира не должны располагаться на одной прямой
|
трёхшарнирных систем:
* распорные ( внешне распорные ), в которых один из трёх дисков – «земля» ( рис. 2.47, а ); в таких системах шарниры A и B, соединяющие два диска с «землёй», называются опорными ( A и B могут быть верхними шарнирами неподвижных шарнирных опор – рис. 2.47, б ), а шарнир С между этими дисками – ключевым; горизонтальная составляющая опорной реакции при вертикальной нагрузке именуется распором;
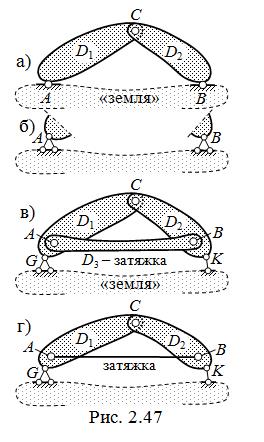
* трёхшарнирные системы с затяжкой ( внутренне распорные ) – рис. 2.47, в; обычно затяжка – прямолинейный стержень, работающий на
растяжение ( рис. 2.47, г ); соединённые в один диск три диска D1 , D2 и D3 ( затяжка ) прикрепляются к «земле» тремя связями, как правило, в виде шарнирных опор – одной неподвижной и одной по
|
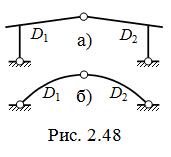
 В зависимости от того, чтó представляют собой диски D1 и D2 , принято выделять трёхшарнирные рамы (с прямолинейными
В зависимости от того, чтó представляют собой диски D1 и D2 , принято выделять трёхшарнирные рамы (с прямолинейными  участками – рис. 2.48, а ) и арки ( диски D1 и D2 – криволинейные стержни – рис. 2.48, б ); трёхшарнирной системой может быть также ферма ( рис. 2.25, б ).
участками – рис. 2.48, а ) и арки ( диски D1 и D2 – криволинейные стержни – рис. 2.48, б ); трёхшарнирной системой может быть также ферма ( рис. 2.25, б ).
.
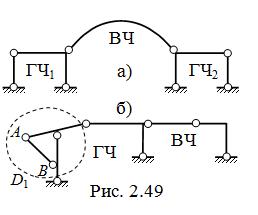
Трёхшарнирные арки и рамы могут присутствовать в составных системах в качестве главных и второстепенных частей ( рис. 2.49 ), также образовывать некоторые составные диски ( D1 на рис. 2.49, б, где стержень AB играет роль наклонной затяжки ).
|
 Определение реакций связей в трёхшарнирных системах
Определение реакций связей в трёхшарнирных системах
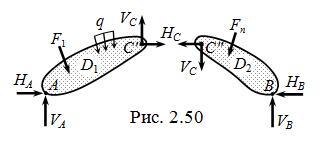
Для внешне распорной ТШС ( рис. 2.47, а, б ) применение принципа освобождения от связей – четырёх внешних в опорах А и B и двух внутренних в ключевом шарнире C – приводит к выявлению шести составляющих реакций связей: HA , VA , HB , VB , HC , VC ( рис. 2.50 ).
Для двух плоских дисков можно записать суммарно шесть уравнений равновесия – достаточно для отыскания всех реакций.
Максимально просто реакции связей вычисляются по следующему алгоритму ( нагрузка – общего вида в плоскости; взаимное расположение опор – произвольное, т. е. на разных уровнях ):
1) опорные реакции RA и RB раскладываются на составля-ющие – вертикальные  ,
,  и наклонные
и наклонные  ,
,  вдоль линии, соединяющей опорные шарниры ( рис. 2.51, а );
вдоль линии, соединяющей опорные шарниры ( рис. 2.51, а );
2) записываются уравнения равновесия всей системы:
S mA = 0; S mB = 0; S x = 0; ( 2.13 )
из первого сразу находится вертикальная реакция правой опоры
= S mA, F / l ; из второго – аналогично  = S mB, F / l , ( 2.14 )
= S mB, F / l , ( 2.14 )
где S mA, F и S mB, F – соответственно суммы моментов всех нагру-
зок относительно точек A и B. Третье уравнение ( 2.13 ) даёт
=  – S Fx / cos a0 ( 2.15 )
– S Fx / cos a0 ( 2.15 )
( здесь S Fx – сумма проекций нагрузок на ось x );
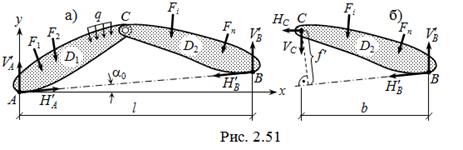
3) производится разделение системы на два диска сечением по ключевому шарниру С ( эта операция является обязательной в расчёте трёхшарнирной системы ) и рассматривается равновесие правого или левого диска ( удобнее – с меньшим числом нагрузок ) – рис. 2.51, б:
– из уравнения  моментов относительно точки С нахо-дится реакция опоры
моментов относительно точки С нахо-дится реакция опоры  , ( 2.16 )
, ( 2.16 )
где  – сумма моментов нагрузок, приложенных к части СВ,
– сумма моментов нагрузок, приложенных к части СВ,
относительно точки С ( положительные моменты – против хода
часовой стрелки );
– два других уравнения S x CB = 0 и S y CB = 0 позволяют определить HC и VC ;
4) по зависимости ( 2.15 ) вычисляется последняя реакция .
Уравнения равновесия другой ( здесь – левой ) части ТШС могут быть использованы для проверки правильности найденных реакций связей.
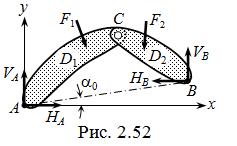
От вычисленных , , , можно перейти к ортого-
гональным составляющим опорных реакций ( рис. 2.52 ), более
удобным для последующих расчётов
внутренних усилий  :
:
 VA = + sin a0 ; ( 2.17 )
VA = + sin a0 ; ( 2.17 )
VB = – sin a0 ; ( 2.18 )
HA = cos a0 ; HB = cos a0 ( 2.19 )
( на схеме a0 > 0 ).
Ч а с т н ы е с л у ч а и
1. Все нагрузки – вертикальные ( S Fx = 0 ): из ( 2.15 ) следует  =
=  ( = H – распор ).
( = H – распор ).
|
 ,
,  , , вводятся VA , VB , HA , HB ; f ' заменяется на f.
, , вводятся VA , VB , HA , HB ; f ' заменяется на f.
Особый случай:
два из трёх шарниров располагаются на одной вертикали ( рис. 2.53, а ) или горизонтали ( рис. 2.53, б ):
целесообразно отступить от вышеизложенного алгоритма и, используя ортогональные составляющие опорных реакций, начинать их определение с уравнения равновесия той части, которой принадлежат упомянутые пары шарниров. Для трёхшарнирной рамы, изображённой на рис. 2.53, а:  ; для системы
; для системы
|
 . Остальные три реакции находятся из условий равновесия системы целом – для левой рамы
. Остальные три реакции находятся из условий равновесия системы целом – для левой рамы  , для правой –
, для правой –  , далее S x = 0 и S y = 0.
, далее S x = 0 и S y = 0.

|
 ,
, 
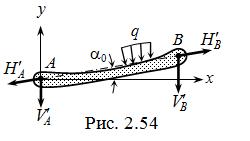
 ), затем из уравнений равновесия затяжки
), затем из уравнений равновесия затяжки 
 отыскиваются
отыскиваются
, ( рис. 2.54 ) и зависимость между и . Реакция или находится тем же приёмом, что и в расчёте внешне распорной ТШС ( см. выше ) – из рассмотрения одного из дисков D1 или D2 ; при этом вместе с нагрузками учитываются уже найденные реакции опор G или K.
|

|


|
 Внутренние силовые факторы в трёхшарнирных системах
Внутренние силовые факторы в трёхшарнирных системах
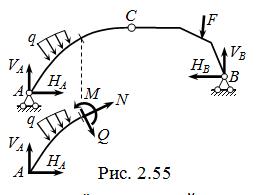
В поперечном сечении стержневого диска трёхшарнирной системы при заданных нагрузках возникают изгибающий момент, поперечная и продольная силы ( рис. 2.55 ).
При произвольной нагрузке усилия M, N и Q отыскиваются по правилам сопротивления материалов – из условий равновесия отсечённой части.
В случае действия только вертикальных нагрузок для вычисления «вручную» силовых факторов в произвольном сечении трёхшарнирной арки или рамы с опорами на одном уровне ( рис. 2.56, а ) удобно использовать
специальные формулы, выражающие искомые усилия в ТШС через изгибающие моменты и поперечные силы в шарнирно опёртой по концам балке того же пролёта и при действии такой же нагрузки, что и рассчитываемая ТШС ( рис. 2.56, б ), а также через распор H арки (рамы) и геометрические параметры сечения ТШС – координаты x и y(x) его центра тяжести и угол наклона q (x) сечения к вертикали ( или такой же угол между касательной к оси стержня и горизонтальной осью x ):
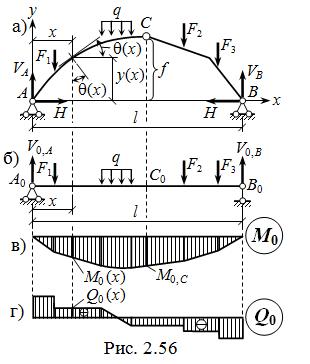
M (x) = M0 (x) – H ∙ y (x); ( 2.20 )
Q (x) = Q0 (x) ∙ cos q (x) – H ∙ sin q (x); ( 2.21 )
N (x) = – [ Q0 (x) ∙ sin q (x) + H ∙ cos q (x) ], ( 2.22 )
где M (x), Q (x), N (x) – усилия в сечении арки (рамы) с абсциссой x;
M0 (x) и Q0 (x) – балочные изгибающий момент и поперечная
|
 сила в сечении с координатой x (рис. 2.56, в, г).
сила в сечении с координатой x (рис. 2.56, в, г).
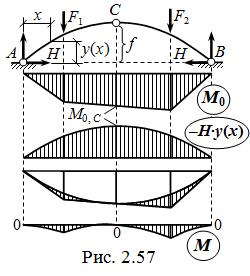
Зависимость ( 2.20 ) не только облегчает вычисление изгибающего момента в любом сечении ТШС, но и позволяет предсказывать вид всей эпюры M ( пример – на рис. 2.57, где, как и везде далее, эпюра построена не на оси арки, а на её горизонтальной проекции ). Заметим, что, во-первых, из условия MC = 0 распор определяется как
H = M0, C / f , ( 2.23 )
а во-вторых, из-за криволинейности оси арки изгибающие моменты в ней изменяются по длине нелинейно даже при отсутствии распределённых
|
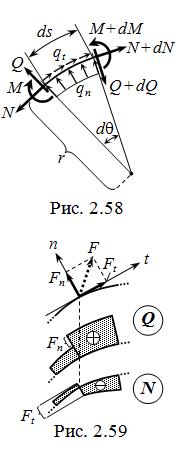
 нагрузок. Нелинейными, согласно ( 2.21 ) и ( 2.22 ), должны быть также и эпюры Q и N в арке. При построении и проверке эпюр внутренних силовых факторов на криволинейных участках трёх-шарнирных систем ( в частности, в арках ), полезно учитывать дифференциальные уравнения равновесия ( рис. 2.58 )
нагрузок. Нелинейными, согласно ( 2.21 ) и ( 2.22 ), должны быть также и эпюры Q и N в арке. При построении и проверке эпюр внутренних силовых факторов на криволинейных участках трёх-шарнирных систем ( в частности, в арках ), полезно учитывать дифференциальные уравнения равновесия ( рис. 2.58 )
 , ( 2.24 )
, ( 2.24 )
из которых первое аналогично ( 1.13 ) для
|
 достаточно просто использовать последнее: на участке без распределённой нагрузки ( qt = 0 ), в точке, где Q = 0, N – экстремальная.
достаточно просто использовать последнее: на участке без распределённой нагрузки ( qt = 0 ), в точке, где Q = 0, N – экстремальная.
Заметим, что из ( 2.24 ) при r =  получаются уравнения ( 1.12 ) – ( 1.14 ) для прямого стержня, практическое примене
получаются уравнения ( 1.12 ) – ( 1.14 ) для прямого стержня, практическое примене
|
 ций и правил на с. 19 – 21. Изложенные там указания относительно особенностей эпюр (изломов и скачков ) в точках приложения сосредоточенных сил и моментов имеют силу как для прямых, так и для криволинейных стержней – на эпюре Q от силы F, наклонной к оси стержня ( рис. 2.59 ) – скачок на проекцию Fn , на эпюре N – на Ft .
ций и правил на с. 19 – 21. Изложенные там указания относительно особенностей эпюр (изломов и скачков ) в точках приложения сосредоточенных сил и моментов имеют силу как для прямых, так и для криволинейных стержней – на эпюре Q от силы F, наклонной к оси стержня ( рис. 2.59 ) – скачок на проекцию Fn , на эпюре N – на Ft .
Описания характера эпюр ( прямые, кривые ), приведённые в табл. 1.1, относятся только к прямым стержням, для арок они недействительны.
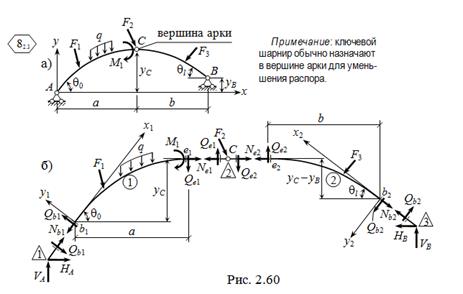
Определение усилий в трёхшарнирных системах на базе об-щего конечно-элементного подхода осуществляется по алгорит-му, изложенному в п. 1.3.1; для рам – как в примере, приведённом на с. 13 – 18; для арки ( рис. 2.60, а ) – по расчётной схеме, показанной на рис. 2.60, б, где заведомо равные нулю моменты в концевых сечениях двух элементов-полуарок у шарнирных узлов не обозначены, и в вектор искомых силовых факторов они не включаются:
S = [ Qb1 Nb1 Qe1 Ne1 Qb2 Nb2 Qe2 Ne2 VA HA VB HB ] т ( nS = 12 ).
Полная система уравнений A∙S + BF = 0 формируется из условий равновесия двух элементов

 ( 2.25 )
( 2.25 )
и трёх узлов:  ( 2.26 )
( 2.26 )
Уравнения третьей группы ( см. с. 18 ) не записываются, так как равенство нулю моментов в концевых сечениях у шарниров уже учтено при составлении вектора S. Раскрывая ( 2.25 ) и ( 2.26 ),
получаем матрицу коэффициентов
|
|

|

|

| – a | – yC | 
| ||||||||
| – 1 | -sin q0 | cos q0 | |||||||||
| 1 | -cos q0 | -sin q0 | |||||||||
| – b | yC – yB | ||||||||||
| – 1 | sin ql | cos ql | |||||||||
| 1 | -cos ql | sin ql | |||||||||
| sin q0 | cos q0 | 1 | |||||||||
| -sin q0 | sin q0 | 1 | |||||||||
| – 1 | 1 | ||||||||||
| 1 | – 1 | ||||||||||
| sin ql | -cos ql | –1 | |||||||||
| cos ql | sin ql | 1 |
и вектор свободных членов уравнений ( от нагрузки ):

где  – суммы моментов нагрузок, приложенных к
– суммы моментов нагрузок, приложенных к
1-му и 2-му элементам-полуаркам, относительно точек b1 и b2 ;
 – суммы проекций внеузловых на-
– суммы проекций внеузловых на-
грузок на собственные оси x1, y1, x2, y2 элементов 1 и 2;
F2x , F2y – проекции нагрузки в узле 2 на глобальные оси x и y.

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы