 |
Главная |


Параллельный колебательный контур и резонанс токов
|
из
5.00
|
Простейший параллельный колебательный контур с потерями в ветвях R1 и R2 имеет вид, изображенный на рисунке 1.21, а.
Комплексная входная проводимость такого контура:
Y =  +
+  = G1 + G2 – j(B1 – B2) = G – jB,(1.93)
= G1 + G2 – j(B1 – B2) = G – jB,(1.93)
где = G1 – jB1; = G2 – jB2 – комплексные проводимости ветвей с индуктивностью и емкостью соответственно.
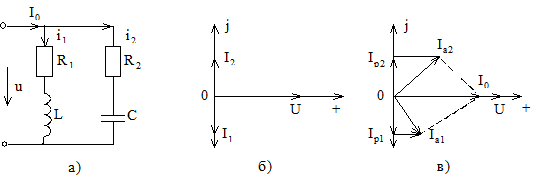
Рисунок 1.21 – Параллельный колебательный контур с потерями
и векторные диаграммы
Из условия резонанса токов имеем j = arctg(B/G) = 0. Отсюда следует:
B = B1 – B2 = {wL/[R12 + (wL)2]} – {(1/wC)/[R22 + (1/wC)2]} = 0.(1.94)
Решив (1.94) относительно w , получим уравнение резонансной частоты
 . (1.95)
. (1.95)
Резонанс в параллельном контуре возможен лишь в случае неотрицательности подкоренного выражения (т. е. при R1 < r и R2 < r илиR1 > r и R2 > r ).
Реактивные составляющие токов в ветвях при резонансе равны друг другу:
Ip1 = UB1 = Ip2 = UB2. (1.96)
При этом ток в неразветвленной части цепи определяется из уравнения:
i0 = U/R0э ,(1.97)
где активное сопротивление R0э называют эквивалентным резонансным сопротивлением параллельного контура.
Входной ток контура совпадает по фазе с приложенным напряжением. Величину R0э можно найти из условия резонанса токов. При резонансе токовВ = 0, а эквивалентное резонансное сопротивление контура равно:
R0э = (r 2 + R1R2)/(R1 + R2) .(1.98)
Контур без потерь. Для контура без потерь (R1 = R2 = 0)уравнение резонансной частоты принимает вид:
wр = w0 = 1/  ,(1.99)
,(1.99)
т. е. совпадает с выражением для последовательного контура. Эквивалентное сопротивление контура без потерь R0э = µи входной ток равен нулю, а добротность обращается в бесконечность.
Контур с малыми потерями.(R1 << r ; R2 << r ).Резонансная частота для этого случая будет приближенно совпадать с частотой w0. Для контура с малыми потерями можно принять, что r2 >> R1R2, тогда:
R0э » r 2/(R1 + R2) = r 2/R = Q2R,(1.100)
где R = R1 + R2.Ток в неразветвленной части цепи: I0 = U/R0э = U/(Q2R), а действующие значения токов в ветвях:
I1 = I2 = U/r = U/(QR).(1.101)
Отношение токов в ветвях к току в неразветвленной части цепи равно добротности контура: I1/I0 = I2/I0 = Q, т. е. ток в реактивных элементах L и С при резонансе в Q раз больше тока на входе контура(отсюда термин «резонанс токов»). На рисунке 1.21, визображена векторная диаграмма токов для этого случая.
При R1 = R2 = r дляwр получаем неопределенность, при этом входное сопротивление контура будет носить чисто активный характер на любой частоте (случай безразличного резонанса).
Частотные зависимости параметров параллельного контура без потерь от частоты имеют вид:
BL(w) = 1/(wL); BC(w) = wC; B(w) = (1/wL) – wC; X(w) = 1/B(w) . (1.102)
На рисунке 1.22 изображены графики этих зависимостей. Из рисунка следует: при w < w0входное сопротивление контура Х носит индуктивный, а при w > w0 – ёмкостной характер, причём вследствие отсутствия потерь при переходе через частоту w = w0ФЧХ контура изменяется скачком от –p/2 до p/2, а входное реактивное сопротивление контура претерпевает разрыв (|Х| = µ ). Комплексное эквивалентное сопротивление контура с малыми потерямиможно определить уравнением:
 . (1.103)
. (1.103)

Рисунок 1.22 – Частотные зависимости параллельного контура без потерь
На рисунке 1.23 изображены нормированные относительно R0эчастотные характеристики Rэ/R0э, Xэ/R0э и Zэ/R0э как функции обобщенной расстройки x.

Рисунок 1.23 – Нормированные частотные характеристики
параллельного контура
Фазочастотная характеристика цепи определится уравнением:
j = –arctg(Xэ/Rэ) = –arctgx .(1.104)
Анализ полученных зависимостей показывает, что по своему виду частотные характеристики контура с потерями существенно отличаются от характеристик контура без потерь. Прежде всего, зависимости реактивного сопротивления контура от частоты: для контура с потерями при резонансе оно оказывается равным нулю, а в контуре без потерь терпит разрыв (рисунок 1.22).
Колебательный контур подключается обычно к источнику с задающим напряжением  и определённым внутренним сопротивлением RГ. При этом напряжение на контуре определяется:
и определённым внутренним сопротивлением RГ. При этом напряжение на контуре определяется:
 . (1.105)
. (1.105)
При резонансе токов:  . (1.106)
. (1.106)
Определяя частотную зависимость  и вводя понятиеэквивалентной добротности контура,которая определяется выражением
и вводя понятиеэквивалентной добротности контура,которая определяется выражением
 , (1.107)
, (1.107)
могут быть получены АЧХ и ФЧХ относительно напряжения на контуре, нормированного к напряжению UКР :
 ;
;  . (1.108, 1.109)
. (1.108, 1.109)
На рисунке 1.24 показан характер этих зависимостей при различных сопротивлениях RГ источника.
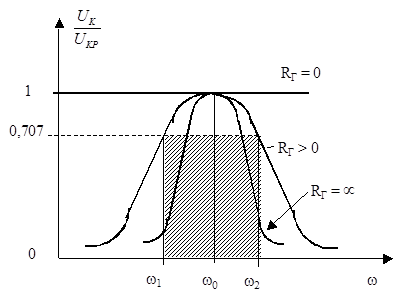
Рисунок 1.24 – Частотные характеристики параллельного контура
Полоса пропускания параллельного контура определяется как полоса частот, на границах которой напряжение на контуре уменьшается в  раз относительно UКР. Параллельный контур в общем случае имеет более широкую полосу, чем последовательный. И только при Rг = ¥ их полосы пропускания будут равны. Таким образом, для улучшения избирательных свойств параллелью контура его необходимо возбуждать источником тока. Параллельный контур нельзя использовать для усиления напряжения, так как всегда Uк.р < Uг.
раз относительно UКР. Параллельный контур в общем случае имеет более широкую полосу, чем последовательный. И только при Rг = ¥ их полосы пропускания будут равны. Таким образом, для улучшения избирательных свойств параллелью контура его необходимо возбуждать источником тока. Параллельный контур нельзя использовать для усиления напряжения, так как всегда Uк.р < Uг.
Электрические фильтры
Фильтры применяются для выделения или подавления определенных колебаний, разделения частотных каналов, формирования спектра сигналов. Электрическим фильтром называется четырёхполюсник, пропускающий без ослабления или с малым ослаблением колебания определенных частот и пропускающий с большим ослаблением колебания других частот.
Полоса частот, в которой ослабление мало, называется полосой пропускания. Полоса частот, в которой ослабление велико, называется полосой непропускания (задерживания). Между этими полосами находится переходная область.
По расположению на шкале частот полосы пропускания различают следующие фильтры:
а) нижних частот (ФНЧ), в которых полоса пропускания располагается на шкале частот от ω = 0 до некоторой граничной частоты ω = ωср, а полоса непропускания (задерживания) – от частоты ω = ωср до бесконечно больших частот (рисунок 1.25, а);

Рисунок 1.25 – Электрические фильтры
б) верхних частот (ФВЧ) с полосой пропускания от частоты ω = ωср до бесконечно больших частот и полосой непропускания от частоты ω = 0 до ω = ωср (рисунок 1.25, б);
в) полосовые (ПФ) – в них полоса пропускания от ωсрн до ωсрв располагается между полосами непропускания 0–ωЗ1 и ωЗ2–µ (рисунок 1.25, в);
г) заграждающие (режекторные), в которых между полосами пропускания 0–ωсрн и ωср –µ находится полоса непропускания ωсрн–ωсрв (рисунок 1.25, г);
д) многополосные, имеющие несколько полос пропускания.
На рисунке 1.25 показаны также условные графические обозначения фильтров каждого типа в соответствии с ГОСТ. Исторически первыми (и все еще наиболее широко применяемыми) являются пассивные фильтры, содержащие элементы L и С. Во многих случаях на практике требовалась крайне высокая избирательность (различие ослаблений в полосах пропускания и непропускания в десятки тысяч раз). Это привело к появлению фильтров с механическими резонаторами: кварцевых, магнито-стрикционных, электромеханических.
Требования микроминиатюризации аппаратуры заставили отказаться от использования индуктивностей, которые имеют большие габаритные размеры, особенно на низких частотах. Появились активные RС-фильтры, состоящие из резисторов, конденсаторов и активных приборов (например, транзисторов). Эти фильтры могут быть выполнены в виде интегральной схемы.
Разработка цифровых систем стимулировала создание фильтров на базе элементов цифровой и вычислительной техники - цифровых фильтров.
Требования к электрическим характеристикам фильтров. Избирательность фильтра определяется крутизной характеристики рабочего ослабления. Чем больше крутизна этой характеристики и чем сильнее ослабление в полосе непропускания, тем лучше избирательность фильтра и меньше уровень помех от подавляемых колебаний. Требования к электрическим характеристикам фильтров задаются в виде допустимых пределов изменения этих характеристик. Так,
а) рабочее ослабление в полосе пропусканияне должно превышать некоторого максимального допустимого значения Аp max, а в полосе непропускания не должно быть ниже некоторого минимально допустимого значения Аp min.
Помимо требований к частотной зависимости рабочего ослабления (а значит, ик АЧХ) могут задаваться также требования:
б) к фазочастотной характеристике фильтра (допустимые отклонения от линейного закона) и величине;
в) к нелинейным искажениям (обусловленных наличием ферромагнетика в катушках индуктивности). Могут предъявляться требования и к другим характеристикам и параметрам фильтра.
Идеальные частотные характеристики фильтра заведомо нереализуемы. Частотные характеристики реальных фильтров могут лишь приближаться к ним с той или иной степенью точности в зависимости от сложности схемы фильтра.
Необходимо сделать два замечания. В теории фильтров принято иметь дело не с обычной угловой частотой w, а с нормированной частотой Ω =w/wн, где wн - нормирующая частота. Обычно в качестве нормирующей частоты выбирают граничную частоту полосы пропускания wср, так что Ω = wср /wн = wср /wср = 1 .
Во-вторых, имеет смысл подробно изучать только фильтры нижних частот, так как остальные типы фильтров (верхних частот, полосовые и заграждающие) могут быть легко получены из ФНЧ с помощью замены переменной (частоты).
Фильтры типа k и m.Фильтром типа k называются лестничные схемы с взаимно обратными сопротивлениями плеч  . Элементарным фильтром типа k является Г-образная схема, представленная на рисунке 1.26, а. Сопротивление r =
. Элементарным фильтром типа k является Г-образная схема, представленная на рисунке 1.26, а. Сопротивление r =  называется номинальным характеристическим сопротивлением фильтра. Из двух Г-образных фильтров можно образовать симметричные Т-образные и П-образные фильтры.
называется номинальным характеристическим сопротивлением фильтра. Из двух Г-образных фильтров можно образовать симметричные Т-образные и П-образные фильтры.
Фильтры типа k обладают двумя существенными недостатками. Во-первых, они имеют малую крутизну характеристики ослабления Ас, во-вторых, частотная зависимость характеристических сопротивлений в полосе пропускания не позволяет удовлетворительно согласовать фильтр с нагрузкой и генератором. Это приводит к потерям энергии за счет ее отражения, особенно на краях полосы пропускания, где рассогласование наибольшее.

Рисунок 1.26 – Фильтр типа k (Г-образная схема)
Чтобы избежать этих недостатков, используют фильтры типа m (рисунок 1.27), которые дают всплески ослабления Ас на частоте резонанса контуров Wµ.

Рисунок 1.27 – Фильтры типа m
Значения элементов фильтра типа m определяются значениями фильтра типа k и параметра  . Фильтры типа m обладают меньшей частотной зависимостью характеристических сопротивлений в полосе пропускания и лучше согласуются с генератором и нагрузкой. Но фильтры типа тимеют в полосе непропускания глубокий спад ослабления Ас.
. Фильтры типа m обладают меньшей частотной зависимостью характеристических сопротивлений в полосе пропускания и лучше согласуются с генератором и нагрузкой. Но фильтры типа тимеют в полосе непропускания глубокий спад ослабления Ас.
Обычно используют каскадное соединение фильтров типа т и k. Фильтры типа k увеличивают ослабление в полосе непропускания, а фильтры типа т поднимают крутизну характеристики ослабления вблизи частоты среза. Ввиду того, что фильтры типа т лучше согласуются с генератором и нагрузкой, их ставят по краям, а звенья типа k в середине составного фильтра.
Вопросы для самотестирования
1 Как ведёт себя полоса пропускания колебательного контура, если возрастает его добротность?
2 Как соотносятся между собой реактивные сопротивления в последовательном колебательном контуре на резонансной частоте?
3 Какой характер носит сопротивление последовательного колебательного контура на резонансной частоте?
4 Напишите формулу для определения резонансной частоты последовательного колебательного контура.
5 Могут ли вносить нелинейные искажения в передаваемый сигнал пассивные фильтры?
1.10 Переходные процессы в цепи RC
Значительный практический интерес представляют нестационарные явления, возникающие при заряде и разряде емкости. Предположим, что цепь на рисунке 1.28 в момент t = 0 подключается к источнику внешнего напряжения. Запишем для этой цепи второй закон Кирхгофа вследующем виде:
uс + ur = e(t), t ³ 0.(1.110)

Рисунок 1.28 – Заряд ёмкости через сопротивление
Учитывая, что ток в цепи i = С  и ur = ir = rC
и ur = ir = rC  , формулу (1.110) можно записать следующим образом:
, формулу (1.110) можно записать следующим образом:
 .(1.111)
.(1.111)
Полученное равенство представляет собой линейное дифференциальное уравнение первого порядка с неизвестной функцией uc. Общее решение уравнения можно записать в виде суммы свободной uсв и вынужденной ив составляющих напряжения:
 , (1.112)
, (1.112)
где tц = rC –постоянная времени цепиrС.
Рассмотрим пример переходного процесса, если цепь rС подключается к источнику постоянного напряжения U0, афункция е(t) имеет вид скачка напряжения. Величина ив в этом случае должна быть равна внешнему напряжению U0, так как при t ® µемкость заряжается до напряжения источника питания. Следовательно,
 .(1.113)
.(1.113)
Для определения постоянной интегрирования А введем начальные условия. Будем иметь uc(0+) = uc(0–) = 0, откуда вытекает, что А = –U0.Таким образом, при t ³ 0:
 ;
;  .(1.114, 1.115)
.(1.114, 1.115)
Из последнего выражения видно, что напряжение на емкости в процессе заряда возрастает по экспоненциаль ному закону, стремясь к величине U0(рисунок 1.29).

Рисунок 1.29 – Переходной процесс в rC цепи
при включении постоянного напряжения
Скорость заряда ем кости зависит от постоянной временя цепи: чем больше величина емкости и активного сопротивления, определяющих tЦ, тем медленнее растет напряжение uc. Ток
 (1.116)
(1.116)
с течением времени убывает по экспоненте. Аналогично изменяется и напряжение на активном сопротивлении:
 . (1.117)
. (1.117)
Если напряжение на емкости к моменту включения равно Uн,начальные условия должны быть записаны в виде: Uc (0+) = Uc(0–) = Uн . В этом случае напряжение uc определяется формулой
 . (1.118)
. (1.118)
|
из
5.00
|
Обсуждение в статье: Параллельный колебательный контур и резонанс токов |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы