 |
Главная |


Радиомаячные системы посадки: предназначение, состав оборудования, задачи, решаемые ее элементами
|
из
5.00
|
Радиомаячные СП предназначены для посадки как одиночных, так и групп ЛА ночью и днем в сложных метеоусловиях. В радиомаячные СП, помимо радиотехнических и светотехнических средств, входящих в состав упрощенной СП, включены технические средства аэродромного управления (диспетчерское оборудование) и радиомаячное оборудование, предназначенное для указания ЛА линии планирования при производстве самой посадки (рис. 3).
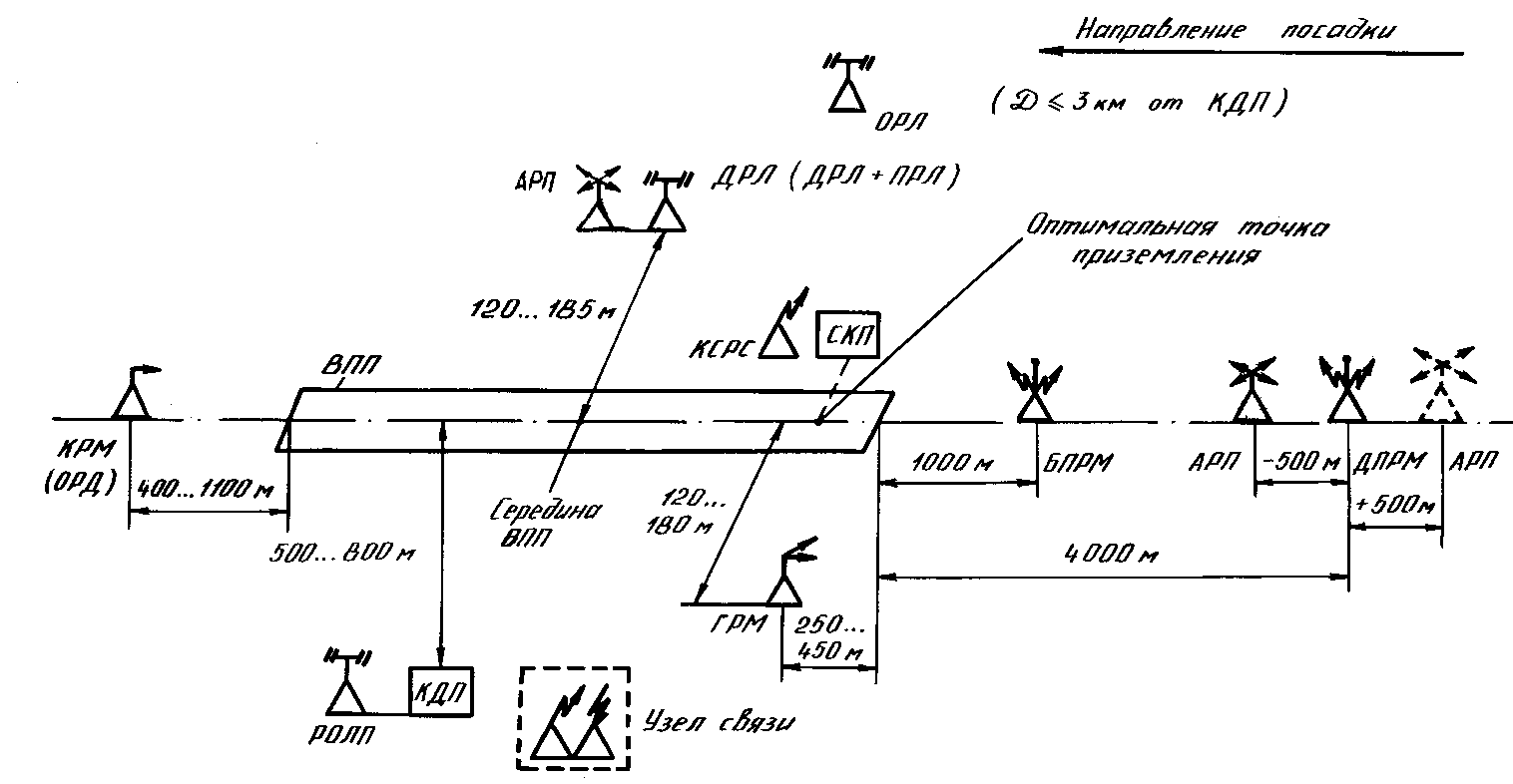
Рис. 3. Примерная схема размещения наземного оборудования радиотехнических систем посадки на аэродроме
В настоящее время в ВВС применяются радиомаячные системы посадки метрового (СП-50М, СП-68, СП-75, СП-80), дециметрового (ПРМГ-4, ПРМГ-4К-некатегорированные, ПРМГ-4КМ, ПРМГ-5, ПРМГ-76у) и сантиметрового (микроволновые системы посадки - МСП) диапазонов радиоволн (табл. 1).
Радиотехнические средства упрощенной СП в составе радиомаячной СП используются для привода ЛА в район аэродрома, облегчения расчета и маневра при заходе на посадку, дополнительного контроля за правильностью снижения ЛА по линии планирования и обеспечения расчета и захода на посадку ЛА, оборудованных только аппаратурой для посадки по упрощенной системе, а также как резервное посадочное средство.
В состав диспетчерского оборудования, как правило, входят обзорный и диспетчерский радиолокаторы (ОРЛ и ДРЛ), автоматический УКВ радиопеленгатор (АРП), импульсный радионавигационный дальномер (ответчик радиодальномера (ОРД)), ЭВМ, средства командной радиосвязи. С помощью этого оборудования оперативная группа, находящаяся на КДП, осуществляет наблюдение за воздушной обстановкой, управление и контроль за движением ЛА в районе аэродрома.
Обзорный радиолокатор используется для непрерывного наблюдения за общей воздушной обстановкой в районе аэродрома в радиусе до 70...150 км и управления движением ЛА на подходах к аэродрому и в процессе их захода в зоны ожидания. С этой целью его выносной индикатор кругового обзора (ИКО) устанавливается на КДП. ОРЛ обычно работает в метровом диапазоне, что позволяет наблюдать за ЛА при любых метеоусловиях.
Диспетчерский радиолокатор работает в сантиметровом диапазоне волн. Поэтому его разрешающая способность значительно выше, чем у ОРЛ и составляет (0,5...1)0 по азимуту и несколько сот метров по дальности. ДРЛ используются для наблюдения за воздушной обстановкой в радиусе до 70 км от аэродрома и для контроля за летным полем. С его помощью осуществляется оперативное управление движением ЛА, находящихся в зонах ожидания, выполняющих заход на посадку и снижение по линии планирования, совершающих приземление и передвигающихся по ВПП и рулежным дорожкам. Обычно несколько его выносных ИКО с различными масштабами разверток устанавливаются на КДП. Кроме того, для обзора летного поля (ОЛП) на крышах аэродромных зданий и вышках может устанавливаться отдельный радиолокатор ОЛП (РОЛП).
Ультракоротковолновый АРП используется для опознавания групп и отдельных ЛА, прибывающих в район аэродрома, и для определения их азимутов с точностью около 20 в радиусе 80...100 км. Надежное опознавание ЛА и возможность определения их азимутов являются необходимыми условиями при организации четкого управления движением ЛА в районе аэродрома.
Расстояние до ЛА в принципе может определяться с помощью радиолокаторов и затем передаваться на борт по радио. Но более удобно для этой цели использовать импульсный радионавигационный дальномер, состоящий из самолетного запросчика и наземного ответчика (ОРД). Такой дальномер позволяет экипажу определять расстояние до аэродрома с точностью 10...100 м в радиусе 80...150 км и осуществлять опознавание аэродрома по виду ответных сигналов наземного ответчика.
ЭВМ различного назначения широко применяются в системах управления воздушным движением в районе аэродрома. В настоящее время они используются для предварительной обработки данных о ЛА, приближающихся к району аэродрома, определения времени их прибытия и задержки в воздухе, расчета радиуса зон ожидания и т.п.
Средства командной радиосвязи являются одной из основ всей системы управления движением ЛА в районе аэродрома. Управление связными радиостанциями осуществляется дистанционно с КДП непосредственно с рабочих мест руководителя полетами и операторов светопланов радиотехнического оборудования.
Радиомаячное оборудование, служащее для указания ЛА линии планирования при посадке, состоит из глиссадного (ГРМ), курсового (КРМ) и радиомаяков (РМ) соответствующих самолетных радиоприемников.
КРМ устанавливается на оси ВПП на определенном расстоянии от конца ВПП. ГРМ располагается сбоку от ВПП примерно на траверзе оптимальной точки приземления. ОРД располагается, как правило, совместно с КРМ или ГРМ.
Следует заметить, что при трехмаркерной комплектации, когда наряду с БПРМ и ДПРМ имеется средний пункт радиомаяков (СПРМ), МРМ и ПАР размещаются не на оси ВПП, а со смещением относительно оси на ± 30 м (БПРМ) и на ± 75 м (СПРМ, ДПРМ). Причем БПРМ размещается от начала ВПП на расстоянии 75...450 м, СПРМ - 1050±150 м, ДПРМ – 6500...11000 м.
Планирование ЛА при посадке по заданной линии глиссады летчик производит путем выдерживания посадочного направления и снижения в плоскости планирования, пользуясь показаниями, например, навигационно-пилотажного прибора (НПП). Вертикальная стрелка этого прибора отклоняется под действием выходного сигнала курсового радиоприемника (КРП), а горизонтальная - глиссадного радиоприемника (ГРП). При правильном заходе на посадку и снижении ЛА по глиссаде обе стрелки КПП пересекаются в центре шкалы. При отклонении ЛА от оси ВПП вертикальная стрелка прибора отклоняется вправо или влево, в зависимости от стороны смещения ЛА. Точно также при смещении ЛА вверх или вниз относительно заданной плоскости планирования горизонтальная стрелка прибора перемещается вниз или вверх от центра, указывая, где находится по отношению к ЛА заданная плоскость планирования. Снижение по линии планирования с помощью глиссадной и курсовой радиомаячной аппаратуры при отсутствии видимости земли может производиться до высоты около 30 м. Дальнейшее снижение ЛА и их посадка осуществляются визуально с использованием светотехнического оборудования, рассмотренного в предыдущем параграфе. Выходные сигналы КРП и ГРП пропорциональны угловым отклонениям ЛА от глиссады в плоскостях курса и планирования. Эти сигналы могут быть использованы в качестве сигналов рассогласования в автоматизированной системе управления ЛА. Рассмотренная система обеспечивает посадку около 30 ЛА в час.
|
из
5.00
|
Обсуждение в статье: Радиомаячные системы посадки: предназначение, состав оборудования, задачи, решаемые ее элементами |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы