 |
Главная |


Моделирование отказов в Vissime
|
из
5.00
|
При моделировании в качестве имитатора реальной системы будем использовать ее нелинейную модель с дополнительно введенными в нее отказами датчиков, исполнительного механизма и объекта управления. Данная модель, созданная в Vissim 5.0 представлена в приложении В.
При моделировании устанавливаются следующие значения вектора входа и начальные значения состояния (3.26):
 ,
,  .
.
Моделирование проводим на временном интервале соответствующем 4 часам.
Рассмотренные типы отказов вводятся в систему по отдельности в момент времени t=2 часа:
1. Отказ датчика уровня h2 : y1(t)=(1-0.2) ∙yR1(t), t>2 часов.
2. Отказ датчика положения х: y3(t)=[1+0.2∙sin(10(t-2))]∙yR3(t), t>2 часов.
3. Утечка в баке 1:
 ,
,  ,t>2 часов.
,t>2 часов.
,  ,t>2 часов.
,t>2 часов.
4. Отказ задвижки:
 ,
,  , t>2 часов.
, t>2 часов.
,  , t>2 часов.
, t>2 часов.
5. Отказ исполнительного механизма: uR1(t)=(1+0.2) ∙u1(t), t>2 часов.
Результаты моделирования отказов представлены на рисунках (3.4) – (3.12).
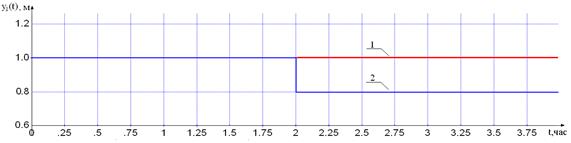
Рис. 3.4. Сигнал y1(t): 1- без отказа, 2 - при отказе датчика уровня h2.

Рис. 3.5. Сигнал y3(t): 1- без отказа, 2 - при отказе датчика положения х.
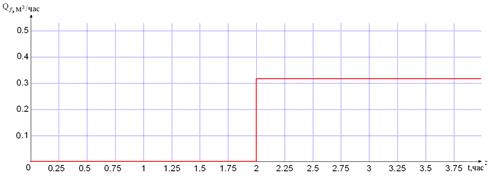
Рис. 3.6. Дополнительный поток Qf1(t) – утечка в баке 1 (внезапный отказ)
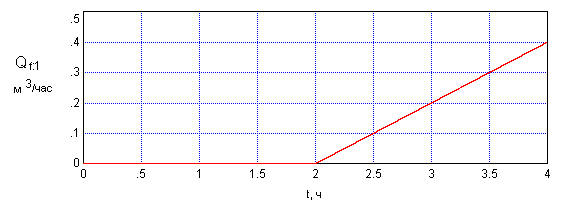
Рис. 3.7. Дополнительный поток Qf1(t) – утечка в баке 1 (зарождающийся отказ)
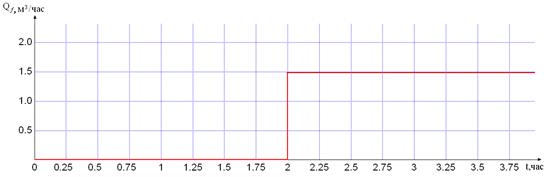
Рис. 3.8. Дополнительный поток Qf2(t), обусловленный отказом задвижки (внезапный отказ)
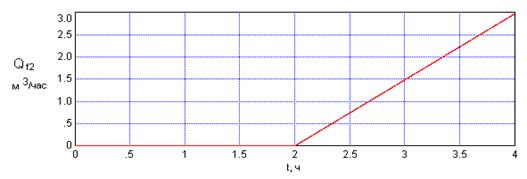
Рис. 3.9. Дополнительный поток Qf2(t), обусловленный отказом задвижки
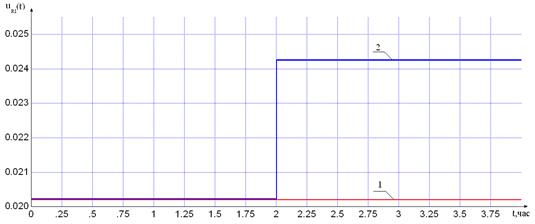
Рис. 3.10. Сигнал uR(t): 1 – без отказа, 2 – при отказе исполнительного механизма
Диагностика отказов с помощью наблюдателей состояния
Для решения задачи диагностики с помощью данных наблюдателей будем использовать описание системы с отказами в форме (3.39).
Выявление отказов
Для решения задачи выявления отказов выполним формирование рассогласования. Формирование рассогласования будем осуществлять с помощью наблюдателей состояния (см. пункт 2.3.8).
Структура формирователя рассогласования ( рисунок 2.11) математически описывается формулой (2.11):
 .
.
Спроектируем формирователь рассогласования.
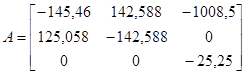
Чтобы определить структуру наблюдателя, рассмотрим исследуемую систему в форме (3.26) без отказов f ( t )=0.
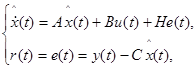
Для воссоздания переменных системы на основе измерений входов и выходов используется наблюдатель состояния, описываемый следующим образом:
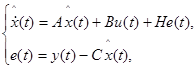 (3.44)
(3.44)
где  ,
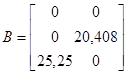
,  , матрицы А,В,С равны матрицам системы (3.26).
, матрицы А,В,С равны матрицам системы (3.26).
При проектировании данного наблюдателя выберем параметры матрицы Н из условия обеспечения его устойчивости. Кроме того, при выборе Н учтем, что наблюдатель должен обладать большим быстродействием чем система, переменные состояния которой он восстанавливает. Выберем следующую матрицу Н:
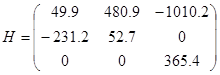 .
.
В качестве рассогласования (пункт 2.3.8) можно использовать взвешенную величину ошибки оценки входа (We(t)). Пусть матрица весовых коэффициентов рассогласования равна W=I, тогда получим следующий формирователь рассогласования r(t):
 (3.45)
(3.45)
где,  ,
,  ,
,  ,
,  .
.
Определим требуемые передаточные функции Hu(s) и Hy(s).
Применим преобразование Лапласа к (3.56), полагая при этом, что x(s)|s=0 = 0:
 (3.46)
(3.46)
Подставив уравнение ошибки e(s) в уравнение состояния (3.58) получим:
 . (3.47)
. (3.47)
С учетом формулы (3.43) и того, что r(s)=We(s) получим:
 . (3.48)
. (3.48)
Передаточная матрица Hy(s) имеет следующий вид:
 , (3.49)
, (3.49)
где  ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
Передаточная матрица Hu(s) может быть получена следующим образом:
 , (3.50)
, (3.50)
 (3.51)
(3.51)
Проверим, выявляемы ли все рассматриваемые отказы.
Выявляемость отказов
Зная структуру формирователя рассогласования на основе наблюдателя состояния, проверим условие выявляемости отказов вектора f ( t ).
Реакция вектора рассогласования на возникающий отказ определяется по формуле (2.15). В данном случае:
 . (3.52)
. (3.52)
Для того, чтобы выявить i-ый отказ fi в рассогласовании r(s), i-ая колонка  передаточной матрицы
передаточной матрицы  должна быть не равна нулю ≠ 0.
должна быть не равна нулю ≠ 0.
Очевидно, что передаточная матрица  не содержит нулевых колонок, поэтому каждый из рассматриваемых отказов датчиков, исполнительного механизма и объекта управления выявляем в рассогласовании r ( t ).
не содержит нулевых колонок, поэтому каждый из рассматриваемых отказов датчиков, исполнительного механизма и объекта управления выявляем в рассогласовании r ( t ).
Кроме того, для всех отказов так же выполняется и строгое условие выявляемости:
 ≠ 0, i=1…4, (3.53)
≠ 0, i=1…4, (3.53)
так как 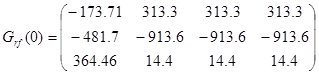 не содержит нулевых столбцов.
не содержит нулевых столбцов.
Таким образом, для выявления всех рассматриваемых отказов достаточно построить формирователь рассогласования с рассмотренной выше структурой (3.57). При воздействии на систему (3.26) любого из отказов вектора f ( t ) рассогласование r(t)= e(t) будет иметь следующий вид:
 , (3.54)
, (3.54)
где ошибка оценки состояния изменяется в соответствии с формулой:
 . (3.55)
. (3.55)
Таким образом, ошибка оценки e(t) будет равна нулю только при отсутствии отказов.
Полученный формирователь рассогласования изображен на рисунке 3.11.
Выявление сигналов отказов выполним сравнением сигнала рассогласования с фиксированным порогом, устанавливаемым при отсутствии отказов:
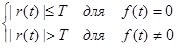 ,
,  . (3.56)
. (3.56)
Пороговые значения для рассогласования, представлены в таблице 3.1.
Таблица 3.1.
Пороговые значения выявления отказов
| T1 | T2 | T3 |
| 2e-7 | 1e-8 | 1e-16 |
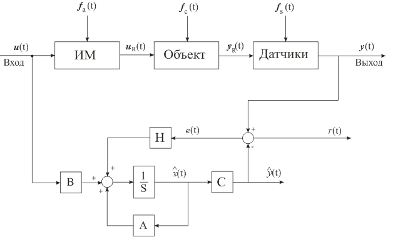
Рис. 3.11. Выявление отказов с помощью наблюдателя состояния
Моделирование
Моделирование выполняем для рассмотренных в 3.3.2 отказов. Начальные условия для формирователя рассогласования (3.57) установим равными:
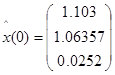 .
.
Реакции рассогласования r(t) на соответствующие отказы изображена на рисунках (3.12) – (3.16).
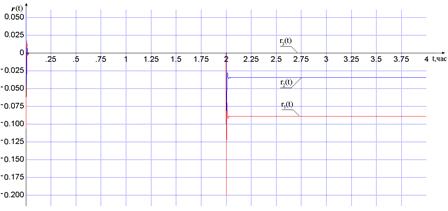
Рис.3.12. Рассогласования при отказе датчика уровня h2
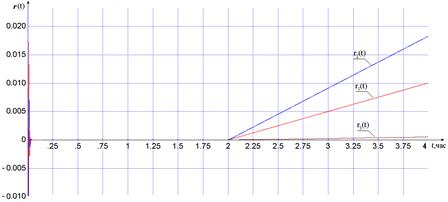
Рис.3.13. Рассогласования при отказе датчика положения х
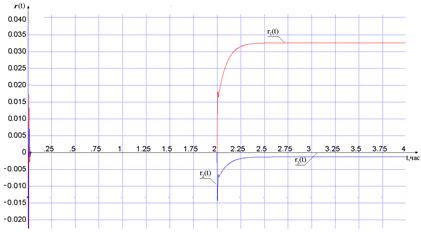
Рис.3.14. Рассогласования при утечке в баке 1
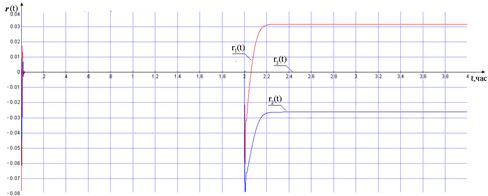
Рис. 3.15. Рассогласования при отказе задвижки
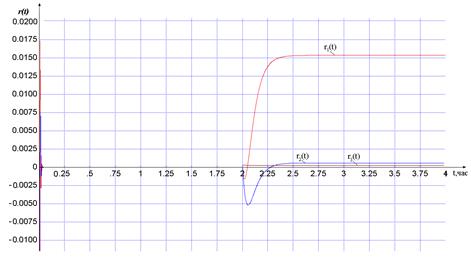
Рис.3.16. Рассогласования при отказе исполнительного механизма
Как видно из рисунков, рассогласования при отсутствии отказов близки к нулю, а при возникновении любого из отказов значительно увеличиваются. Таким образом, выполняется выявление отказов с помощью наблюдателя состояния. Из рисунков так же видно, что выявление отказов с помощью наблюдателей происходит практически без временной задержки, что является существенным преимуществом их использования.
Изоляция отказов
После выявления отказов необходимо выполнить их изоляцию.
Для выявления отказов достаточно одного рассогласования. В нашем случае это рассогласования было получено с помощью формирователя рассогласования на основе наблюдателя состояния. Однако, для изоляции отказов одного рассогласования не достаточно.
Как было описано ранее, с помощью наблюдателей можно выявлять возникающие в системе отказы датчиков и исполнительных механизмов. Сформируем группу рассогласований для изоляции отказов датчиков.
|
из
5.00
|
Обсуждение в статье: Моделирование отказов в Vissime |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы