 |
Главная |


Изоляция отказов датчиков
|
из
5.00
|
При условии, что в системе присутствуют только отказы датчиков, выход системы может быть задан следующим образом:
Если нам необходимо выявить только отказы датчиков, то выход системы может быть задан так:
y(s) = Gu(s)u(s) + fs(s), (3.57)
где Gu(s) определяется по (3. ), fs(s) - s-преобразование вектора отказов датчиков:
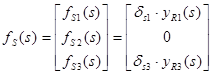 . (3.58)
. (3.58)
Необходимо спроектировать совокупность сигналов рассогласования, которая позволяла бы изолировать отказы каждого датчика. Для этого, в соответствии с пунктом 2.3.6 можно использовать различные схемы изоляции отказов. Рассмотрим возможность использования схемы наблюдателей Франка. В соответствии с этой схемой, в данном случае, необходимо спроектировать два сигнала рассогласований каждое из которых будет нечувствительно только к одному из отказов датчиков ( отказу датчика уровня h2 или отказу датчика положения х).
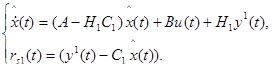
Спроектируем сигнал рассогласования чувствительный к отказу первого датчика fs1(s) = [fs1(s); fs2(s)] и не чувствительный к отказу датчика положения fs2(s). Перепишем уравнение (4.69) так:
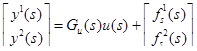 , (3.59)
, (3.59)
где y1(s) = [y1(s); y2(s)], y2(s) = y3(s), fs2(s) = fs3(s).
Тогда генератор рассогласования примет следующий вид:
rs1(s) = [rs11(s); rs12(s)] = Hu1(s) u(s)+ Hy1(s)y1(s). (3.60)
При подстановке y1(s) в это уравнение получим:
rs1(s) = [Hu1(s) + Hy1(s)Gu(s)]u(s) + Hy1(s)fs1(s). (3.61)
Рассогласование будет чувствительно только к отказу fs1(s), когда матрицы передаточной функции генератора рассогласования будут удовлетворять следующим условиям:
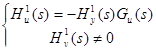 (3.62)
(3.62)
Для рассматриваемой системы (3.26)  . При использовании наблюдателя состояния передаточная матрица(см. (3.60)):
. При использовании наблюдателя состояния передаточная матрица(см. (3.60)):
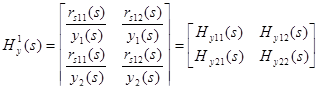
связывающая рассогласование и 1 и 2 выходы системы в соответствии с (3.63) так:
 , (3.64)
, (3.64)
где С1 – матрица С , из которой исключена 3 строка, Н1 – соответствующий вектор обратной связи наблюдателя состояния. Следовательно, передаточная матрица Hu1(s) будет иметь вид:
 . (3.65)
. (3.65)
При проектировании рассогласования таким образом может быть изолирован отказ первого датчика. Из этих формул видно, что для этого необходимо спроектировать наблюдатель состояния, запускаемый всеми входами системы и всеми, за исключением одного у3(t) выходами. Формирователь рассогласования, построенный на основе такого наблюдателя будет иметь вид:
 (3.66)
(3.66)
После расчета коэффициентов обратной связи наблюдателя Н1 из условия обеспечения его устойчивости получим следующий формирователь рассогласования:
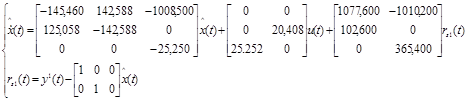 , (3.67)
, (3.67)
Аналогичным образом определяется формирователь рассогласования позволяющий изолировать отказ датчика положения:
 , (3.68)
, (3.68)
Таким образом, с помощью полученной совокупности рассогласований {rs1(t), rs3(t)} выполняется изоляция отказов датчиков: каждое рассогласование не чувствительно только к соответствующему отказу датчика т.е. оно близко к нулю при соответствующем отказе, и больше некоторого порогового значения при отказе другого датчика.
Следует отметить, что в данном случае формируются вектора рассогласования rs1(t)=[ rs11(t); rs12(t)] и rs3(t)=[ rs31(t); rs32(t)]. Для выполнения выявления отказов достаточно использовать по одному из элементов данных векторов. Выберем в качестве рассогласований:
rs1(t)=rs12(t)=y2(t)-  . (3.69)
. (3.69)
rs3(t)=rs31(t)=y1(t)-  . (3.70)
. (3.70)
Пороговые значения для рассогласований представлены в таблице 3.2. Схема изоляции отказов датчиков представлена на рисунке 3.17. Сигнатуры рассогласований при различных отказах датчиков приведены в таблице 3.3, реакции рассогласований на отказы датчиков изображены на рисунках 3.18, 3.19.
Таблица 3.2.
Пороговые значения рассогласований
| Ts1 | Ts3 |
| 3e-8 | 1.1e-8 |
Таблица 3.3.
Сигнатуры рассогласований
| Отказ | rs1 | rs3 |
| fs1 – датчик уровня h2 | 0 | 1 |
| fs3 – датчик положения задвижки | 1 | 0 |
Значение «1» в таблице 3.3 означает превышение рассогласованием соответствующего порогового значения.
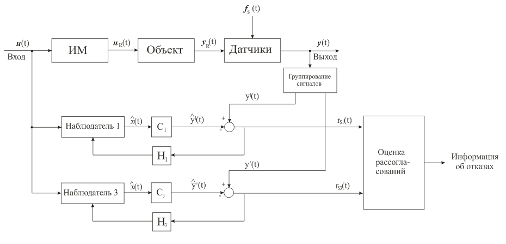
Рис. 3.17. Схема изоляции отказов датчиков
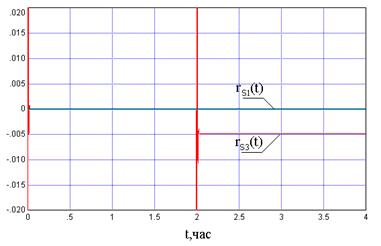
Рис. 3.18. Рассогласования при отказе датчика уровня h2
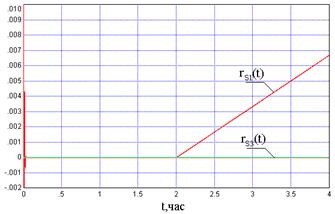
Рис. 3.19. Рассогласования при отказе датчика положения
|
из
5.00
|
Обсуждение в статье: Изоляция отказов датчиков |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы