 |
Главная |


Описание системы с отказами
|
из
5.00
|
Для решения поставленной задачи первоначально необходимо спроектировать формирователь рассогласования и блок оценки рассогласований.
Для этого все полученные модели рассмотрим в совокупности и получим общее описание системы с отказами.

Рис. 3.3. Система и воздействующие на нее отказы
На вход исполнительного механизма поступает известный сигнал от контроллера u(t). Сигнал uR(t) - управляющее воздействие от исполнительного механизма, поступает на вход объекта управления. Выходной сигнал объекта управления yR(t) непосредственно не доступен и измеряется с помощью датчиков.
Таким образом для целей диагностики известными принимаются входные и выходные векторы системы:
u(t) – известный вход исполнительного механизма;
y(t) – измеряемый датчиками выход системы.
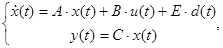
С учетом рассмотренных моделей элементов системы (см. (3.9) – объект управления, (3.11) – исполнительный механизм, (3.12), (3.13), (3.14) - датчики) получим следующее математическое описание системы в переменных состояния:
 (3.28)
(3.28)
где  ,
,  - входной вектор системы – сигнал управления, поступающий с контроллера на вход исполнительного механизма,
- входной вектор системы – сигнал управления, поступающий с контроллера на вход исполнительного механизма,
 - выходной вектор системы,
- выходной вектор системы,
 - возмущающее воздействие.
- возмущающее воздействие.
В качестве возмущающего воздействия рассматривается поток жидкости поступающий в первый бак:
d(t)= Q1(t), м3/час. (3.29)
Вектор состояния системы описывается следующим образом:
 , (3.30)
, (3.30)
где h2(t) – уровень во втором баке, м;
h1(t) – уровень в первом баке, м;
х(t) – положение задвижки, м.
Как указывалось выше, в соответствии с выбранным методом формирования рассогласования необходимо использование линейной модели системы. Поэтому, выполним линеаризацию системы (3.26) в какой-либо рабочей точке.
Для разности уровней в баках h1-h2 = 0.16357,м с помощью программы Vissim 5.0, была получена следующая линейная модель:
 (3.31)
(3.31)
где 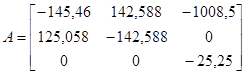 ,
,  ,
,  ,
, 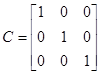 .
.
Данная линейная модель, содержащая внешнее возмущение может быть использована при проектировании рассогласований на основе наблюдателей при неизвестном входе. При использовании наблюдателей состояния необходимо использовать описание системы в форме, не содержащей неизвестных составляющих. В этом случае будем полагать, что поток жидкости, поступающий в первый бак является известной величиной, входящей в вектор управления. Тогда линейная система будет иметь следующий вид:
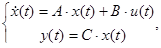 (3.32)
(3.32)
где,  ,
,  . Входной вектор системы содержит сигнал управления с контроллера – uk(t) и поток Q1(t):
. Входной вектор системы содержит сигнал управления с контроллера – uk(t) и поток Q1(t):
 . (3.33)
. (3.33)
Когда в системе действуют все рассматриваемые отказы датчиков, компонентов и исполнительного механизма, ее модель (3.29) может быть представлена следующим образом:
 (3.34)
(3.34)
где  - вектор отказа датчиков,
- вектор отказа датчиков,  ,
,  - векторы отказов компонентов системы, описывающие утечку в баке и отказ задвижки соответственно,
- векторы отказов компонентов системы, описывающие утечку в баке и отказ задвижки соответственно,  - вектор отказа исполнительного механизма.
- вектор отказа исполнительного механизма.
Рассмотрим математическое описание векторов, введенных в систему отказов.
Отказы датчиков. В соответствии с уравнением (3.19) датчики подвержены мультипликативным отказам, при которых измерение становится  , а i-ая составляющая вектора отказов может быть переписана так
, а i-ая составляющая вектора отказов может быть переписана так  =
=  .
.
Таким образом вектор отказов имеет вид:
 , (3.35)
, (3.35)
где величины отказов δsi для датчиков определяются по формулам (3.20), (3.21):
δs1={-1…1}, δs3= α∙t.
Отказы компонентов системы. В данном случае в качестве отказа компонентов системы рассматриваются протечка в баке 1 и отказ задвижки. В результате этих отказов нарушаются динамические отношения в системе: независимо от входного потока жидкости Q1 и положения задвижки х в установившемся режиме происходит изменение уровней жидкости в баках. Вектора отказов компонентов системы в соответствии с формулами (3.22)-(2.25) могут быть представлены следующим образом:
 ; (3.36)
; (3.36)
 . (3.37)
. (3.37)
Отказ исполнительного механизма. Отказ исполнительного механизма, моделируемый в соответствии с уравнением (3.10), связан с изменением параметров системы, и, следовательно, является мультипликативным. Данный отказ может быть описан следующим образом:
 . (3.38)
. (3.38)
Система со всеми отказами может быть описана с помощью общего вектора отказов f(t):
 (3.39)
(3.39)
где вектор отказов и матрицы распределения отказов имеют следующий вид:
 ,
,
 ,
,  .
.
Запишем данную систему с отказами с помощью передаточных функций:
 , (3.40)
, (3.40)
где
 (3.41)
(3.41)
Получим численные значения данных передаточных матриц для рассматриваемой линеаризованной системы с отказами (4.96):
 , (3.42)
, (3.42)
где  ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
 , (3.43)
, (3.43)
где  ;
;
 ;
;
 ;
;
 .
.
|
из
5.00
|
Обсуждение в статье: Описание системы с отказами |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы