 |
Главная |


Датчики пути и положения
|
из
5.00
|
Обеспечивают создание управляющих сигналов в зависимости от пройденного пути или положения рабочих органов управляемого объекта.
Механические путевые датчики. Они представляют собой упоры и длиноограничители, которые устанавливают на станине для ограничения перемещения движущихся частей станка (Рис. 47). Точность работы по упорам колеблется в пределах 0.04-0.002 мм.

Рис. 47. Упор токарного станка
Электроконтактные датчики – это кулачки и упоры, конечные, путевые микропереключатели (рис. 48).
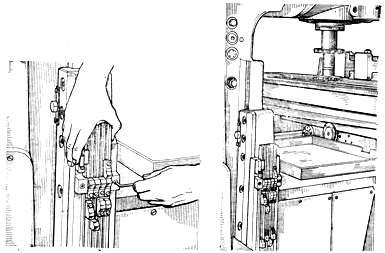
Рис. 48.Электроконтактные датчики
Путевые и конечные выключатели (рис. 49) устанавливают на неподвижных частях рабочих органов, а движущиеся рабочие органы, на которых укреплены кулачки, достигнув заданного положения, воздействуют на датчики, вызывая их срабатывание. У датчиков имеются штоки или рычаги 2, которые воздействуют через механизм передачи на контакты 1.
Имеются также электроконтактные размерные датчики, которые как и путевые, являются датчиками перемещений. Двухпредельный датчик рычажного типа (рис. 49г) состоит из корпуса 2, в котором расположен измерительный шток 1 в цилиндрических втулках. На штоке установлен наконечник 13 для контактирования с измеряемой деталью. Сверху устанавливают отсчетную головку 9. Положение стрелки регулируют гайкой 12 с микропередачей. На штоке установлен хомутик 10 с пружиной 11, создающей силу измерения. На колодке 5 с помощью крестообразной пружины 4 укреплён рычаг 6 с подвижными контактами 8. Настроечные контакты 3, регулируют с помощью барабанов 7 с нанесёнными на них делениями. Предел измерения датчиков составляет 1 мм, предельная погрешность + - 1 мкм.
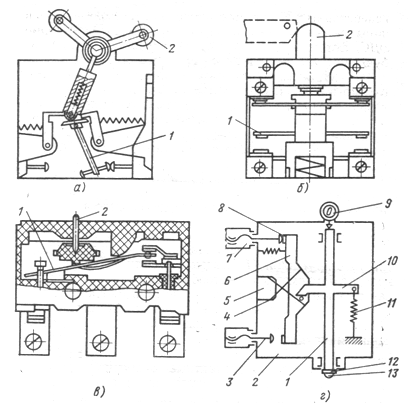
Рис. 49. а, б – путевые выключатели; в – микропереключатель; г – размерный преобразователь.
Кроме двухконтактных в некоторых устройствах применяют многопозиционные электроконтактные датчики (рис. 50).
Шток 1 перемещается в направляющих втулках 8, расположенных в корпусе 12. На штоке 1 закреплены хомутики 7 и 11, воздействующие на контактные рычаги 6 и 9, контакты которых могут замыкаться контактами 2, 3 и 4, регулируемые винтами. Пружина 10 создает определенное усилие на штоке 1. Рычаг 5 служит арретиром. Датчик имеет четыре положения для передачи сигнала, когда упор не нажимает на шток 1, замкнут контакт 2, контакты 3 и 4 разомкнуты; при незначительном перемещении штока 1 под воздействием упора контакт 2 размыкается, контакты 3 и 4 остаются разомкнутыми; при дальнейшем перемещении штока 1 под воздействием упора контакт 4 замыкается, а контакты 2 и 3 остаются разомкнутыми; при продолжающемся движении штока 1 под воздействием упора контакт 2 остается разомкнутым, контакт 3 замыкается.
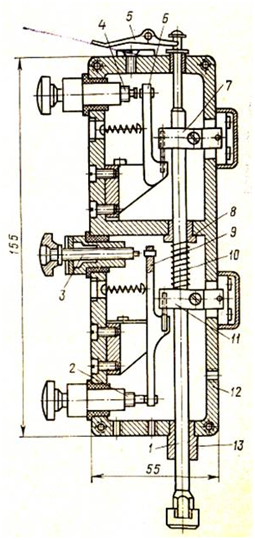
Рис.50. Трёхпозиционный электроконтактный датчик
Многопозиционные датчики сложнее в изготовлении, эксплуатации и значительно дороже двухконтактных. Путевые электроконтактные датчики имеют пределы измерения 0—25 мм с предельной погрешностью до ±0,5 мкм.
В следящих системах датчики пути и положения во многом определяют точность позиционирования. По принципу действия эти датчики подразделяются на индуктивные (аналоговые) и оптические (импульсные), а по конструктивному исполнению – на круговые и линейные.
Аналоговые измерительные преобразователи в основном электромагнитного типа. Они основаны на принципе электромагнитной индукции и подразделяются на вращающиеся трансформаторы (резольверы) и индуктосины.
Вращающийся трансформатор (ВТ) (рис. 51) имеет на статоре и роторе по две обмотки, магнитные оси которых взаимно перпендикулярны.
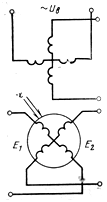
Рис. 51. Вращающийся трансформатор
Ротор вращающегося трансформатора может поворачиваться на некоторый угол, произвольный по отношению к статору. Статорные обмотки питаются двухфазным напряжением переменного тока со сдвигом фаз 90 град. Обмотки статора создают в воздушном зазоре электродвигателя пульсирующее магнитное поле. На вторичной (выходной) обмотке ВТ выдаётся сигнал, соответствующий сдвигу оси пульсирующего магнитного поля относительно оси ротора, связанного с валом двигателя или ходовым винтом. ВТ обеспечивает точность измерения угла +- 5 град.
Индуктосин состоит (рис. 52) из набора измерительных шкал 1 ( линейных или круговых) и головки 2, перемещающейся (с зазором) относительно шкалы.
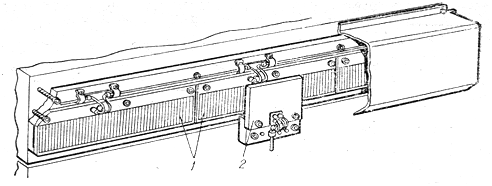
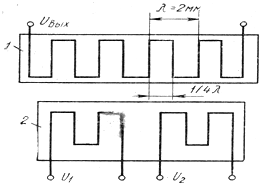
Рис. 52. Индутоксин
Измерительная шкала (250 мм) укреплена на неподвижной части и представляет собой стальную линейку, на которой на соответствующую изолирующую подложку фотохимическим способом нанесена печатная обмотка зигзагообразной формы с шагом 2 мм. На подвижной части линейки (головке) нанесены две обмотки, являющиеся якорем. Вторая обмотка сдвинута на ¼ шага. На каждую обмотку подаётся напряжение с частотой 10 кГц. С линейки снимается выходное напряже- ние Uвых. При перемещении подвижной части 2 на линейке 1 индуцируется циклическая ЭДС. Число циклов определяется числом пройденных шагов.
Оптические датчики по сравнению с аналоговыми обеспечивают большую точность и лучше согласуются с системами ЧПУ. Линейный (рис. 53а) и круговой (рис. 53б) оптические датчики состоят из механической, оптической и электронной систем.
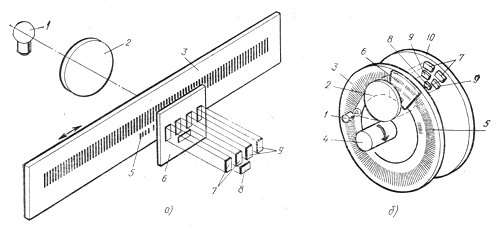
Рис. 53. Оптический датчик
1 – осветитель,
2 – линза,
3 – шкала,
4 – вал,
5 – риски нуль-метки,
6 – съёмник,
7,8,9 – фотодиоды,
10 – корпус.
На съёмнике растры расположены в два сектора, сдвинутые друг относительно друга на ¼ шага штрихов. При перемещении линейки относительно считывающей головки с фотодиодов снимаются сигналы преобразуемые в дальнейшем в импульсы. Для повышения точности и снижения дискретности применяется четыре фотодиода, которые работают как нониус. Дискретность отсчета для круговых датчиков до 1 – 5 секунд; в линейных от 4 до 5 мкм.
Круговые оптические датчики (рис. 54) используются также в электронных штурвалах, предназначенных для ручного перемещения механизмов.
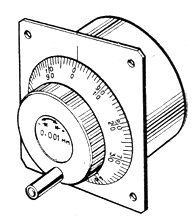
Рис. 54. Круговой оптический датчик
При повороте лимба, связанного с оптическим датчиком, в ЧПУ поступают импульсы, управляющие приводом. Каждый импульс соответствует перемещению механизма на единицу дискреты. Число импульсов, выдаваемых датчиком штурвала, определяется углом поворота лимба, а частота этих импульсов – скоростью его вращения.
Гидравлические и пневматические путевые датчики. В гидравлических системах изменением величины и направления потока рабочей жидкости (масла) к исполнительному звену регулируют работу механизмов. Датчиками гидравлических систем служат золотники.
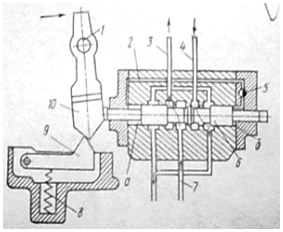
Рис. 55. Гидравлический датчик-золотник
Гидравлический датчик золотник (рис. 55) позволяет изменять направление жидкости, поступающей в одну или другую полость исполнительного звена (силового цилиндра), либо от одного исполнительного звена к другому. Когда движущаяся часть станка нажмет на рычаг 10, он поворачивается вокруг оси 1 и тянет влево плунжер 6. При этом жидкость, нагнетаемая в трубопровод 7 и ранее подававшаяся через камеру в канал 3, изменит направление и начнет поступать в канал 4, так как канал 3 перекроется плунжером. Чтобы при перекрытии каналов избежать больших гидравлических ударов, в золотнике предусмотрено устройство, замедляющее ход плунжера. Это устройство состоит из камеры с полостью а, трубопровода 2 и дросселя 5, заполненных маслом. Резкому движению плунжера препятствует масло, перекачиваемое из полости а в полость б плунжером при движении влево, из полости, б в полость а, при движении плунжера вправо. Сопротивление движению плунжера регулируется дросселем 5. На рычагах 10 и 9 имеются скосы, чтобы при повороте рычага 10 рычаг 9 легче отжимался вниз, а затем под действием пружины 8 вновь поднимался вверх, фиксируя рычаг 10 в повернутом положении. Пневматические путевые датчики изменяют направление потока воздуха, чтобы закрыть или открыть доступ воздуху к исполнительному звену. Такие датчики, аналогично гидравлическим, выполняют в виде золотников, кранов и клапанов.
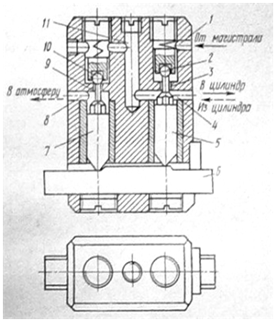
Рис. 56. Пневматический датчик
Многие пневматические датчики полностью срабатывают лишь при значительных перемещениях частей станка (10—13 мм). На рис. 56 приведена конструкция датчика, срабатывающего при перемещении на 1—1,5 мм. Движущаяся часть станка перемещает шток 6 вправо или влево. В положении, показанном на рисунке, воздух из магистрали через каналы 1, 3, 4 поступает к исполнительному звену. Каналы 11, 9, 8, сообщающиеся с атмосферой, перекрыты шариковым клапаном 10. При перемещении штока 6 влево плунжер 5 и шариковый клапан 2 под действием пружины опускаются вниз, а плунжер 7 и клапан 10, сжимая пружину, поднимается вверх. При этом перекрывается канал 3 и прекращается подача воздуха из магистрали, а через каналы 4, 11, 9, 8 воздух выходит в атмосферу.
|
из
5.00
|
Обсуждение в статье: Датчики пути и положения |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы