 |
Главная |


Плоские рычажные механизмы
|
из
5.00
|
Исходные данные
1. Плоские рычажные механизмы
Дано: 








а) структурный анализ плоского рычажного механизма
б) синтез кинематической схемы плоского рычажного механизма
2. Кинематический анализ плоского рычажного механизма
а) построение планов положений
б) построение планов скоростей и планов ускорений
в) определение значений и направлений угловых скоростей и угловых ускорений всех звеньев
3. Силовой анализ плоского рычажного механизма
а) составление расчетной схемы
б) метод кинетостатики для одного положения кривошипа
в) теорема Жуковского для того же положения звеньев
4. Динамический анализ плоского рычажного механизма
а) составление динамической модели
б) построение диаграмм 
в) вывод уравнения и построение диаграммы 
г) построение диаграммы энергия-масса
д) определение значения момента инерции маховой массы
Механизм с высшими кинематическими парами
5. Простой зубчатый механизм




а) структурный анализ простого зубчатого механизма
б) синтез эвольвентного зацепления простого зубчатого механизма
6. Сложные зубчатые механизмы




α = 20º

а) структурный анализ сложного зубчатого механизма
б) синтез кинематической схемы сложного зубчатого механизма
в) кинематический анализ сложного зубчатого механизма
7. Кулачковый механизм
а) структурный и кинематический анализы
б) определение радиуса исходного контура
в) синтез профилей кулачка




 ;
; 
[ϑ]=45°
8. а) Завершение работ графической части
б) Оформление пояснительной записки
в) Защита КП
Содержание курсового проекта
1. Задание на курсовой проект
2. Структурный анализ плоского рычажного механизма
3. Кинематический анализ плоского рычажного механизма
4. Силовой анализ плоского рычажного механизма
5. Динамический анализ плоского рычажного механизма
6. Механизмы с высшими кинематическими парами
а) Зубчатые механизмы
б) Кулачковый механизм
7. Список литературы
Плоские рычажные механизмы
1.1 Структурный анализ
Для данного сложного рычажного механизма необходимо определить число степеней свободы (подвижность) и выполнить структурный анализ.
Число степеней свободы исследуемого механизма определим по формуле Чебышева:

где n- число подвижных звеньев в составе исследуемой кинематической цепи;
 - число пар четвертого класса;
- число пар четвертого класса;
 - число пар пятого класса;
- число пар пятого класса;
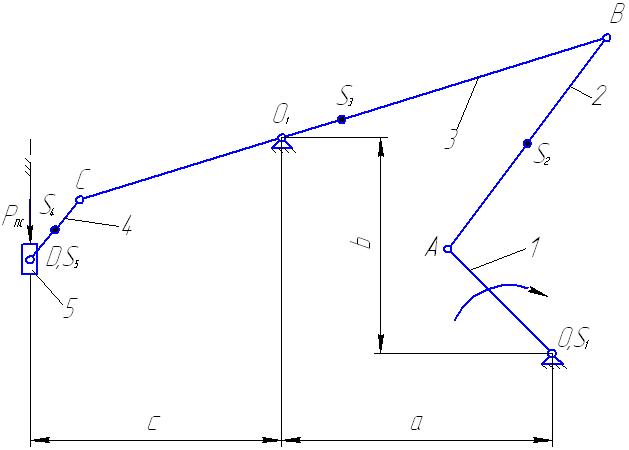
Рисунок 1
 Для определения величины коэффициента n проанализируем структурную схему механизма (рисунок 1).
Для определения величины коэффициента n проанализируем структурную схему механизма (рисунок 1).
Структурная схема механизма состоит из шести звеньев, рассмотрим движения каждого звена и занесем их в Таблицу 1- Звенья механизма:
Таблица 1 – Звенья механизма
| Вид движения | Название звена | № звена |
| неподвижное | стойка | 0 |
| вращательное | кривошип | 1 |
| сложное вращательное | шатун | 2 |
| поступательное | коромысло | 3 |
| поступательное | ползун | 4 |
| поступательное | ползун | 5 |
|
| ||
при этом звенья 1– 5 являются подвижными звеньями, а стойка 0 – неподвижным звеном. Она представлена в составе структурной схемы двумя направляющими ползуна и шарнирно-неподвижной опорой. Следовательно, n=5.
Для определения коэффициентов и найдем все кинематические пары, входящие в состав рассматриваемой кинематической цепи. Результаты исследований заносим в Таблицу 2 – Кинематические пары.
Таблица 2 – Кинематические пары
| № | Номер звеньев/ название | Схема кинематической пары | Класс / подвижность | Вид контакта/замыкание |
| 1 | 2 | 3 | 4 | 5 |
| 1 | 0 – 1/ вращательная |

| 5/1 | поверхность (низшая)/ геометрическое |
| 2 | 1 – 2/ вращательная | 
| 5/1 | поверхность (низшая)/ геометрическое |
| 3 | 2–3/ вращательная | 
| 5/1 | поверхность (низшая)/ геометрическое |
| 4 | 3–0/ вращательная |

| 5/1 | поверхность (низшая)/ геометрическое |
| 5 | 3–4/ вращательная | 
| 5/1 | поверхность (низшая)/ геометрическое |
| 6 | 4 – 5/ вращательная | 
| 5/1 | поверхность (низшая)/ геометрическое |
| 7 | 5 – 0/ поступательная | 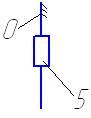
| 5/1 | поверхность (низшая)/ геометрическое |
Из анализа данных табл. 2 следует, что исследуемый механизм состоит из семи пар пятого класса и образует замкнутую кинематическую цепь. Следовательно,  , а
, а  .
.
Подставив найденные значения коэффициентов n, и в формулу Чебышева, получим:

Для выявления структурного состава механизма разбиваем рассматриваемую схему на структурные группы Ассура.

Рисунок 2
Группа звеньев 5 – 4 (рисунок 2). Данная группа состоит из двух подвижных звеньев:
шатун 4 и ползун 5;
двух поводков:
коромысло 3 и направляющая (стойка) 0:
и трех кинематических пар:
5 – 4 вращательная пара пятого класса;
4 – 3 вращательная пара пятого класса;
5 – 0 поступательная пара пятого класса; тогда  и
и  .
.
Подставив выявленные значения коэффициентов в формулу Чебышева, получим:

 Следовательно, группа звеньев 4-5 является структурной группой 2 класса (число подвижных звеньев n=2), 2 порядка (структурная группа имеет 2 поводка), 2 вида (ВВП).
Следовательно, группа звеньев 4-5 является структурной группой 2 класса (число подвижных звеньев n=2), 2 порядка (структурная группа имеет 2 поводка), 2 вида (ВВП).
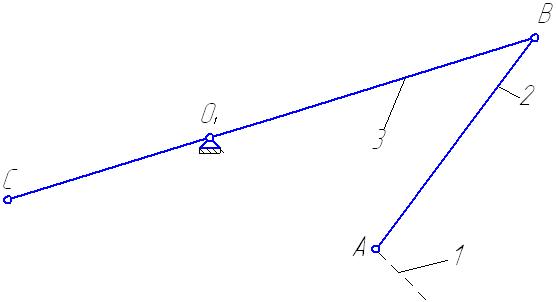
Рисунок 3
Группа звеньев 3 – 2 (рисунок 3). Данная группа состоит из двух подвижных звеньев: коромысло 3 и шатун 2; двух поводков: шатун 1 и стойка 0, и трех кинематических пар:
3 – 2 вращательная пара пятого класса;
1 – 2 вращательная пара пятого класса;
3 – 0 поступательная пара пятого класса; тогда и .
Подставив выявленные значения коэффициентов в выражение получим:
Следовательно, структурная группа звеньев 2-3 является структурной группой 2 класса (число подвижных звеньев n=2), 2 порядка (структурная группа имеет 2 поводка), 1 вида (ВВВ).
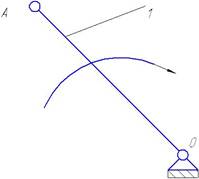
Рисунок 4
Группа звеньев 0 – 1 (рисунок 4). Данная группа состоит из подвижного звена кривошипа 1, стойки 0 и одной кинематической пары:
0 – 1 – вращательная пара пятого класса;
тогда  и
и  .
.
Подставляя найденные значения коэффициентов в формулу Чебышева, получим:

Данный результат означает, что для однозначного определения возможных положений звеньев данного механизма достаточно одной обобщенной координаты.
Следовательно, группа звеньев 0 – 1 не является структурной группой Ассура, а представляет собой первичный механизм, подвижность которого равна 1.
Из проведённого анализа следует, что подвижность данного сложного рычажного механизма равна 1; механизм имеет следующий структурный состав: первичный механизм с подвижностью равной 1 и две структурные группы 2 класса, 2 порядка, 1 и 2 вида.
|
 | |||||
| |||||
 | |||||
Вывод:
Из проведенного анализа следует , что подвижность механизма равна 1. Механизм имеет следующий структурный состав: первичный механизм с подвижностью равной 1, и две структурные группы Ассура 2 класса, 2 порядка, 1 и 2 вида. Класс механизма определяется наивысшим классом структурной группы, входящей в его состав, следовательно данный механизм 2 класса.
|
из
5.00
|
Обсуждение в статье: Плоские рычажные механизмы |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы