 |
Главная |


Теоретический материал
|
из
5.00
|
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РЕСПУБЛИКИ КАЗАХСТАН
Екибастузский инженерно-технический институт им.ак.К.И.Сатпаева
Утверждаю:
Проректор УМР, к.т.н., профессор
___________ Турсунов М.Ж.
«___» ___________20___ г
Методические указания к выполнению практических работ
по дисциплине «Линейные системы автоматического регулирования»
направление подготовки: 5В070200–«Автоматизация и управление»
(шифр, название)
Екибастуз – 201_ г.
| Методические указания к выполнению лабораторных работ составлены на основании | Типовой учебной программы в соответствии с государственным общеобязательным стандартом образования РК 5.04.019 -2011 и типовым учебным планом специальности 5В070200 - Автоматизация и управление, утвержденным приказом МОН РК №158 от 10.04.2012. |
Методические указания к выполнению практических работ составила
| Доцент | Быстрова С.В. |
(должность, звание) (подпись) (Фамилия И.О.)
Методические указания к выполнению практических работ рассмотрены на заседании кафедры
| Автоматизация и информационные системы |
Протокол №___ от «___» ____________ 20___г.
| Заведующий кафедрой: к.х.н., профессор | Пак В.Г. |
Одобрено учебно-методическим советом инженерно-экономического факультета
Протокол №___ от «___»____________ 20____ г.
| Председатель: к.т.н., профессор | Турсунов Н.Ж. |
Офис: ул. Энергетиков, 54, ауд. № 25а
Тел: 8 (7187) 33 - 05 – 53
Содержание
Практическая работа № 1 4
«Составление функциональных схем по принципиальным схемам систем автоматического регулирования» 4
Практическая работа № 2 14
Математическое описание систем автоматического регулирования. Формы записи дифференциальных уравнений. Определение передаточных функций отдельных элементов функциональных схем. 14
Практическая работа № 3 35
Типовые звенья. Дифференциальные уравнения, передаточные функции, временные и частотные характеристики звеньев. 35
Практическая работа № 4 78
«Основные правила составления и преобразования структурных схем и определение передаточных функций систем» 78
Практическая работа № 5 115
«Построение логарифмических частотных характеристик звеньев и систем» 115
Практическая работа № 6 156
«Исследование устойчивости стационарных линейных систем» 156
Практическая работа № 7 180
« Исследование устойчивости линейных систем с применением 180
критерия Гурвица, Льенар-Шипара» 180
Практическая работа № 8 200
Исследование устойчивости линейных систем на основе построения годографа Михайлова. 200
Практическая работа № 9 215
Исследование устойчивости линейных систем на основе построения графиков вещественной и мнимой функций Михайлова. 215
Практическая работа № 10 227
Исследование устойчивости линейной системы по критерию Найквиста. 227
Практическая работа № 11 251
«Исследование устойчивости линейной системы по логарифмическим частотным характеристикам» 251
Практическая работа № 12 275
«Определение областей устойчивости по одному и 275
двум параметрам» 275
Практическая работа № 13 292
Определение запасов устойчивости системы по амплитуде и фазе на основе построения графика амплитудной фазовой частотной характеристики разомкнутой системы. 292
Практическая работа № 14 305
Определение запасов устойчивости системы по амплитуде и фазе на основе построения графиков логарифмических частотных характеристик 305
Практическая работа № 15 321
Определение прямых и косвенных оценок качества регулирования линейной системой. 321
Практическая работа № 1
«Составление функциональных схем по принципиальным схемам систем
автоматического регулирования»
Целью работы является составление функциональных схем линейной непрерывной системы автоматического регулирования (САР) заданной принципиальной схемой системы, численными значениями ее параметров, дифференциальными уравнениями элементов системы.
Выполнение работы:
1. По заданной принципиальной схеме САР составить функциональную схему и дать краткое описание её функционирования. При составлении функциональной схемы системы использовать функциональные элементы, приведенные в приложении.
Теоретический материал
Функциональное описание САУ и их элементов
Схема САУ часто используется в качестве упрощенного варианта типовой функциональной схемы САУ. На рис.1.1 изображены другие варианты функциональных схем САУ.
На рис.1.1, а приведена более полная упрощенная типовая функциональная схема САУ, на которой показаны основные составные части управляющего устройства: ЧУ, ВУ, ИУ.
Чувствительные устройства (ЧУ) (измерительные устройства, датчики) служат для измерения подаваемых на управляющее устройство воздействий (сигналов)  ,
,  ,
,  .
.
Вычислительное устройство (ВУ) реализует алгоритм работы управляющего устройства. В простейшем случае оно осуществляет элементарные математические операции, такие, как операция сравнения, определяющая разность  , т.е. сравнение цели управления и выхода объекта управления. Используются также операции интегрирования, дифференцирования и т.п. В более сложных случаях ВУ может представлять собой ЭВМ и даже комплекс ЭВМ.
, т.е. сравнение цели управления и выхода объекта управления. Используются также операции интегрирования, дифференцирования и т.п. В более сложных случаях ВУ может представлять собой ЭВМ и даже комплекс ЭВМ.
Исполнительное устройство (ИУ) предназначено для непосредственного управления объектом, т.е. изменения его состояния в соответствии с сигналом, выдаваемым ВУ.
Вышеперечисленные составные части являются основными, но, кроме них, могут быть и другие вспомогательные устройства, например преобразователи, служащие для согласования отдельных частей системы, устройства связи и т. п.
| u |
| g |
| y |
| f |
| УУ |
| ЧУ |
| ВУ |
| ИУ |
| ОУ |
а)
| УУ |
| g(t) |
| x(t) |
| u(t) |
| y(t) |
| yoc(t) |
| f(t) |
| ПЭВ |
| ЧЭ |
| ЭГОС |
| ЭМОС |
| ИЭ |
| РО |
| ОУ |
| УЭ |
| ЗЭ |
| ППЭ |
б)
Рис.1.1 - Типовые функциональные схемы САУ
В современной учебной литературе по ТАУ в качестве типовой функциональной схемы часто используется схема, представленная на рис.1.1, б. Эта схема в наибольшей степени соответствует определению функциональной схемы как совокупности соединенных определенным образом элементов (звеньев, блоков) системы по выполняемым ими функциям, независимо от их физической природы.
На рис.1.1, б использованы следующие обозначения элементов функциональной схемы:
ЗЭ - задающий элемент (потенциометр, кулачок, магнитная лента, нивелир, световой луч) - служит для задания определенного закона (алгоритма) управления выходной величиной;
ЭГОС - элемент главной обратной связи (чувствительный элемент, первичный преобразователь - датчик) - служит для измерения текущего значения регулируемой величины  и преобразования ее в другого рода
и преобразования ее в другого рода  , удобную для технической реализации схемы;
, удобную для технической реализации схемы;
ЭС - элемент сравнения (выявляющий элемент) - служит для выявления разницы между заданным и текущим значениями регулируемой величины и формирует полезный сигнал (сигнал ошибки, сигнал рассогласования);
ППЭ - последовательный преобразующий элемент - служит для преобразования сигнала, поступающего с элемента сравнения, в такой сигнал, который позволяет УУ (регулятору) придать системе желаемые динамические свойства;
УЭ - усилительный элемент - служит для усиления поступающего сигнала до значения, достаточного для приведения в действие исполнительного элемента (ИЭ);
ИЭ - исполнительный элемент - служит для перемещения регулирующего органа ОУ в направлении компенсации сигнала рассогласования, преобразованного УУ;
РО - рабочий (регулирующий) орган;
ОУ - объект управления - техническое устройство, преобразующее один вид энергии в другой и совершающее полезную работу;
ПЭВ - преобразовательный элемент возмущения - служит для преобразования основного возмущения в сигнал, воздействующий на УУ;
ЭМОС - элемент местной обратной связи - служит для придания системе требуемых динамических свойств;
ЧЭ - чувствительный элемент - служит для измерения основного возмущения.
Из схемы на рис.1.1, б следует, что САУ условно состоит из двух каналов: канал I - канал прямой связи, содержит все элементы, преобразующие сигнал в одном (прямом) направлении (от ЗЭ к УУ); канал II - канал обратной связи, несет информацию о регулируемых параметрах для сравнения их на входе системы (от ОУ к ЭС).
Задание: По заданной принципиальной схеме САР составить функциональную схему и дать краткое описание её функционирования. При составлении функциональной схемы системы использовать функциональные элементы, приведенные в приложении.
Задание 1
Схема, показанная на рисунке 1.2, представляет собой САР температуры в помещении. Объектом регулирования (ОР) в данной системе является помещение, для которого регулируемая величина — температура внутри помещения Ө, регулирующее (управляющее) воздействие — температура воздуха ӨК, поступающего из калорифера, возмущающее воздействие — изменения внешних факторов f(в общем случае изменение температуры атмосферного воздуха, его влажности, скорости ветра). При исследовании системы в качестве основного возмущения следует рассматривать изменение температуры окружающего воздуха.
Воспринимающим органом — ВО (датчиком, чувствительным элементом) в данной САР является терморезистор RД, включенный в мостовую схему, обеспечивающую с помощью резистора RОзадание необходимого значения температуры в помещении и выполняющую также функции сравнивающего органа — СО (элемента сравнения). Усиление сигнала разбалансаΔU(сигнала рассогласования) измерительной мостовой схемы обеспечивается посредством усилителя. Усиленный сигнал Uобеспечивает вращение двухфазного исполнительного двигателя, который изменяет перемещение клапана (заслонки) на трубопроводе подачи парав калорифер, чем достигается изменение температуры воздуха на входе калорифера — регулирующего воздействия на объектерегулирования.

|
1 - помещение; 2 - теплообменник (калорифер), 3 - измерительная мостовая схема; 4 - двухфазный исполнительный двигатель, 5 — дифференциальный магнитный усилитель; 6 — клапан (заслонка)
Рис. 1.2. Схема САР температуры
Динамические свойства объекта регулирования и элементов системы описываются следующими уравнениями:

где То, Т2, Т3, Т4 — постоянные времени, с; Ө — значение температуры воздуха в помещении, °С, Ө к — значение температуры воздуха на выходе калорифера, °С; к, к1, к2, к3, к4— коэффициенты передачи; f— возмущающее воздействие на объекте регулирования; Uд —падение напряжения на термодатчике, В; ΔU— напряжение на выходе мостовой схемы (сигнал рассогласования), В; μ. — линейное перемещение клапана, см; U0 — задающий сигнал, В.
Значения параметров элементов САР по вариантам даны в таблице Б.1.
Заданное значение температуры в помещении Ө = 20 °С.
Табл.1.1.
Значения параметров элементов САР
| Вариант | Т0, с | Т2, с | к | к1, В/0С | к4 | к2, см/(В*с) | f,.0С | К3, °С/см |
| 0,06 | 0,2 | 0,2 | 0,002 | -11 | ||||
| 0,07 | 0,25 | 0,3 | 0,001 | |||||
| 0,08 | 0,3 | 0,25 | 0,0018 | -8 | ||||
| 0,09 | 0,35 | 0,2 | 0,002 | |||||
| 0,10 | 0,4 | 0,2 | 0,002 | -5 | ||||
| 0,50 | 0,18 | 0,25 | 0,003 | |||||
| 0,055 | 0,19 | 0,4 | 0,0035 | |||||
| 0,06 | 0,17 | 0,4 | 0,0025 | -15 | ||||
| 0,06 | 0,25 | 0,2 | 0,0016 | |||||
| 0,08 | 0,4 | 0,15 | 0,0014 | -18 |
Примечание. Для всех вариантов постоянные времени Т3 = 20 с, Т4=0,5 с.
Задание 2
Схема САР, приведенная на рисунке 1.3, обеспечивает стабилизацию угловой скорости электродвигателя постоянного тока который совместно с рабочим механизмом является объектом регулирования. Регулируемая величина объекта — угловая скорость двигателя ω, регулирующее воздействие — напряжение Uг,подаваемое от генератора на якорь двигателя. Возмущающее воздействие на объекте регулирования — момент сопротивления Мс, создаваемый рабочим механизмом. Угловая скорость двигателя ωконтролируется тахогенератором, сигнал которого Uтг, пропорциональный скорости, сравнивается с задающим сигналом U3. Сигнал рассогласования ΔU = U3— UTг усиливается магнитным усилителем и воздействует на обмотку возбуждения генератора, выполняющего функции исполнительного органа (элемента).
Динамические свойства объекта регулирования и элементов САР описываются следующими уравнениями:

гдеТд, Ту, Tv — постоянные времени, с; Кд, Км, Ктг, Ку, Кг — коэффициенты передачи соответствующих элементов систем

|
Рис. 1.3. Схема САР угловой скорости электродвигателя:
1 — задающий потенциометр; 2 — магнитный усилитель; 3 — генератор; 4 — двигатель; 5 — тахогенератор; 6 — рабочий механизм
Табл.1.2
Значения параметров элементов САР
| Вариант | Ту, с | Ку | Кг | Тг, с | Кд, рад/ с*В | Тд, с | Км рад/ с*Н* м | Мс, Н*м | Кгг, В*с/ рад |
| 0,020 | 4,0 | 2,0 | 0,10 | 1,0 | 0,5 | 0,02 | 1,0 | ||
| 0,015 | 5,0 | 1,8 | 0,12 | 0,95 | 0,60 | 0,03 | 0,9 | ||
| 0,018 | 4,5 | 1,7 | 0,15 | 0,85 | 0,70 | 0,04 | |||
| 0,022 | 6,0 | 1,5 | 0,20 | 0,8 | 0,80 | 0,05 | 0,7 | ||
| 0,020 | 5,8 | 1,6 | 0,16 | 1,5 | 0,65 | 0,06 | 0,6 | ||
| 0,025 | 4,2 | 2,0 | 0,25 | 1,4 | 0,75 | 0,07 | 0,5 | ||
| 0,020 | 3,5 | 2,7 | 0,22 | 1,3 | 0,80 | 0,08 | 0,4 | ||
| 0,028 | 6,2 | 2,1 | 0,30 | 1,2 | 0,75 | 0,02 | 0,5 | ||
| 0,018 | 6,5 | 2,3 | 0,16 | 1,0 | 0,50 | 0,013 | 0,6 | ||
| 0,014 | 7,0 | 2,5 | 0,20 | 1,25 | 0,80 | 0,015 | 0,7 |
Значения параметров объекта регулирования и элементов системы для различных вариантов указаны в таблице 1.2. Заданное значение угловой скорости ω = 40 рад/с.
Задание 3
На рисунке 1.4 изображена схема САР давления Р в ресивере (воздухосборнике) 1, который является в данной системе объектом регулирования. Давление в ресивере регулируется посредством изменения количества воздуха Q, зависящего от положения заслонки 2, т.е. от ее линейного перемещения Х3, которое можно рассматривать как регулирующее воздействие на входе объекта регулирования. Внешним возмущением, вызывающим отклонение регулируемой величины — давления Р, является изменение расхода сжатого воздуха Qc.

Рис 1.4. Схема САР давления Р в ресивере
Давление в данной системе контролируется с помощью сильфонного датчика 3, выходная величина которого — перемещение Хс сильфона 5 однозначно зависит от разности сил ΔF= F0- Fp, где Fp- сила, создаваемая давлением Р, F0— сила натяжения пружины 6, которое можно изменять винтом 7.
Перемещение сильфона Хсс помощью потенциометрического преобразователя 4 преобразуется в электрический сигнал — напряжение U, которое усиливается электронным усилителем 8. Выходной сигнал усилителя Uyуправляет электромагнитным приводом 9, связанным с заслонкой 2,
В данной САР сильфонный датчик выполняет функции воспринимающего, задающего и сравнивающего органов. Как воспринимающий орган он контролирует давление Р, преобразуя его в силу Fp. Задание требуемого давления в ресивере обеспечивается посредством силы F0. Как сравнивающий орган сильфон обеспечивает сравнение величин F0 и Fp, в результате чего, как отмечалось ранее, получается ΔF= F0 — Fp — сигнал рассогласования.
Динамические свойства объекта регулирования и элементов САР описываются следующей системой уравнений:

| заслонкой |
Физическая сущность переменных, входящих в уравнения, отражена выше в описании схемы САР. Параметры T0, T1, T2, T3 и К0, Кq, Кв, Кc, Кп, Ку, К3 — соответственно постоянные времени и коэффициенты передачи. Их размерности и значения по вариантам даны в таблице 1.3. Требуемое значение давления Р = 500 кПа.
Таблица.1.3
Значения параметров элементов САР
| Вариант | Т0,с | Ко КПа/мм | Т1,с | Т2,с | Кс мм/Н | Кв Н/кПа | КQ, Кпа*с/м3 | ΔQC, м3/с | Кп В/мм | Ку | Т3 | К3 Мм/В |
| 1,3 | 0,2 | 0,045 | 2,5 | 0,5 | 0,1 | 0,2 | 0,01 | |||||
| 0, 25 | 0 ,04 | 2,5 | 0,5 | -0, 2 | 0,2 | 0,01 | ||||||
| 0,6 | 3,5 | 0,34 | 0,022 | 2,5 | 0,5 | 0,3 | 0,2 | 0,01 | ||||
| 4,8 | 0,25 | 0,035 | 2,5 | 0,5 | -0,15 | 0,2 | 0,01 | |||||
| 0,7 | 4,5 | 0,3 | 0,04 | 2,5 | 0,5 | 0,12 | 0, 9 | 0,01 | ||||
| 0,8 | 3,5 | 0,18 | 0, 025 | 2 ,5 | 0,5 | -0,2 | 0 ,2 | 0,01 | ||||
| 0,4 | 4,4 | 0,25 | 0,03 | 2,5 | 0,5 | 0,11 | 0,2 | 0,01 | ||||
| 0,65 | 5,5 | 0,2 | 0,02 | 2,5 | 0,5 | -0,12 | 0,2 | 0,01 | ||||
| 0, 7 | 0, 4 | 0 ,025 | 2,5 | 0,5 | 0,14 | 0,2 | 0,01 | |||||
| 0,55 | 0,25 | 0,035 | 2,5 | 0,5 | -0,14 | 0,2 | 0,01 |
Задание 4
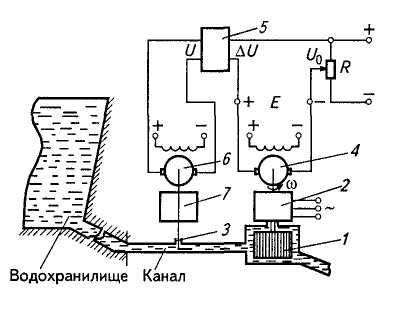
На электрических станциях при производстве электроэнергии предъявляют определенные требования к стабильности частоты f генерируемой ЭДС. Частота f однозначно определяется угловой скоростью ω рабочего колеса гидротурбины. В связи с этим гидротурбины на электростанциях оснащают САР угловой скорости. На рисунке 1.5 показана схема одного из вариантов такой САР.
В данной системе объектом регулирования является гидротурбина 1, регулируемой величиной — угловая скорость ω .Она при постоянном расходе воды изменяется в зависимости от нагрузки на валу турбины, т. е. от мощности Р, которая потребляется от генератора 2 (с увеличением мощности угловая скорость снижается, с уменьшением — возрастает). Таким образом, мощность Р является внешним возмущающим воздействием на объекте регулирования. Для регулирования угловой скорости предусмотрена заслонка 3, с помощью которой изменяется расход воды через турбину. Он однозначно зависит от вертикального перемещения X заслонки. Следовательно, перемещение заслонки X можно рассматривать как регулирующее воздействие объекта регулирования. Угловая скорость ω контролируется посредством тахогенератора 4, ЭДС Е которого сравнивается с задающим напряжением U0. Сигнал рассогласования Δ U через усилитель 5 управляет посредством электродвигателя 6 и редуктора 7 заслонкой 3.
|
Рис. 1.5. Схема САР угловой скорости рабочего колеса гидротурбины
Динамические свойства элементов САР описываются следующей системой уравнений:
 Гидротурбина:
Гидротурбина:
Тахогенератор:
Е = Кт*ω
Сравнивающий орган:
Δ U= U0 - Е
Электронный усилитель:
U= ky*Δ U

|
Электродвигатель совместно с заслонкой
Таблица.1.6
Значения параметров элементов САР
| Вариант | То, с | К0 Рад/с* см | К1 Рад/с* кВт | Кт В*с/ рад | Ку | Р, кВт | Тм, с | Тя, с | Кэ, см/(с • В) |
| 0,1 | 0,01 | 1,0 | -100 | 0,02 | 0,005 | 0,02 | |||
| 0,15 | 0,015 | 1,0 | 0,019 | 0,004 | 0,02 | ||||
| 0,11 | 0,016 | 1,0 | -70 | 0,018 | 0,003 | 0,02 | |||
| 0,12 | 0,01 | 1,0 | 0,017 | 0,002 | 0,02 | ||||
| 0,15 | 0,01 | 1,0 | -95 | 0,016 | 0,002 | 0,02 | |||
| 0,2 | 0,011 | 1,0 | 0,015 | 0,002 | 0,02 | ||||
| 0,1 | 0,015 | 1,0 | -75 | 0,014 | 0,002 | 0,02 | |||
| 0,14 | 0,018 | 1,0 | 0,02 | 0,005 | 0,02 | ||||
| 0,16 | 0,01 | 1,0 | -100 | 0,018 | 0,003 | 0,02 | |||
| 0,18 | 0,01 | 1,0 | 0,016 | 0,002 | 0,02 |
Практическая работа № 2
Математическое описание систем автоматического регулирования.
Формы записи дифференциальных уравнений. Определение передаточных
функций отдельных элементов функциональных схем.
Цель работы:
Изучение формы записи линейных дифференциальных уравнений. Определение передаточных функций отдельных элементов функциональных схем.
|
из
5.00
|
Обсуждение в статье: Теоретический материал |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы