 |
Главная |


Ковшовые конвейеры и подъемники непрерывного действия 12 страница
|
из
5.00
|
Отсыпают грунт совместно с плани-землей, и при движении бульдозера на ма-
лои скорости вперед грунт высыпается в зазор ниже режущей кромки отвала, а в дальнейшем, после выхода машины на отсыпанную возвышенность - вперед, наращивая последнюю. Частично отсыпанный грунт уплотняется перемещаемыми по нему движителями. Освобождение отвала от грунта без его планировки заключается в отходе от него бульдозера задним ходом. Так, в частности, засыпают траншеи и пазухи фундаментов.
Возвращают бульдозер на исходную позицию следующего рабочего цикла на максимально возможной скорости задним (при небольших расстояниях передвижения) или передним ходом с разворотами.
Техническую производительность (м3/ч) бульдозеров на послойной разработке грунтов определяют в зависимости от вида земляного сооружения. При разработке выемок она равна приведенному к плотному состоянию объему грунта, вынутого из выемки за 1 ч непрерывной работы:
3600 • V
П =---------=Е-
™ t к >
ц р
где Кпр - объем призмы волочения в конце копания в разрыхленном состоянии, м3; tu - продолжительность цикла, с; кр - коэффициент разрыхления грунта.
Объем призмы волочения является функцией ширины В (м) и высоты Н (м) отвала:
Vnv = B№knv,
где кп„ - коэффициент пропорциональности, зависящий от крутизны откоса в призме волочения и от отношения RIB. При HIB = 0,15 ... 0,45 он изменяется в пределах от 0,65 до 0,6 для связных (глины, суглинки) и от 0,45 до 0,35 для несвязных (пески, супеси) грунтов.
Продолжительность рабочего цикла (с) при движении бульдозера передним ходом с разворотами на концах участка передвижения:
ta = 3,6[ /K/vp + /т /vT + (/к + /T)/vnx] + tn + ty,
а при возвратном движении задним ходом -
tn = 3,6[ /K/vp + /т /vT + (1К + /T)/v3x] + ty,
где /к и /т - длины участков копания и транспортирования (несовмещенного с копанием), м; vp, v% vnx и v3x - скорости рабочего, транспортного, возвратного вперед и возвратного назад ходов, км/ч; /п и tу - время, затрачиваемое на повороты и управление машиной в течение рабочего цикла, с.
Все скорости определяют расчетом из условий полного использования тягово-сцепных свойств базового трактора и с учетом буксования, особенно в режиме копания, уменьшая рабочие скорости на 20 ... 30% против расчетных. Так же, расчетом определяют продолжительность поворота бульдозера, а затраты времени на управление машиной принимают равными 7 ... 8 с.
Если копание и транспортировка грунта полностью совмещены, как, например, при засыпке грунтом траншей, то последняя зависимость преобразуется к виду:
ru = 3,6/K(l/vp+l/v3X) + ?y.
При возведении насыпей техническую производительность вычисляют по объему отсыпанного грунта, приведенному к плотному состоянию, с учетом потерь при транспортировке через края отвала в боковые валики, которые составляют 3 ... 6% от текущего объема призмы волочения:
11тн — Птв Кп,
где кп - коэффициент потерь грунта.
Отвал 5 бульдозера с поворотным в плане отвалом (см. рис. 7.37, в) не имеет боковых стенок. Он соединен с рамой 3 универсальным шарниром 12 в ее центральной части, позволяющим отвалу поворачиваться в плане в каждую сторону на угол 30° ... 36° гидроцилиндрами 11 с последующим закреплением толкателей 10 на раме 3. Наклон отвала в вертикальной плоскости, а также его перекос осуществляется рассмотренными выше способами для неповоротного отвала. Для одновременной планировки откосов и их подошвы отвал дополнительно оборудуют наклонной наставкой 16 (рис. 7.37, д) с жестким или шарнирным соединением с основным отвалом. В последнем случае наклон наставки регулируют специально установленным гидроцилиндром. Наставка 17 соответствующего профиля предназначена для очистки и планировки канав. Для перемещения грунта от стен зданий применяют отвальную приставку 18, двигаясь при этом задним ходом. Эффективность работы бульдозера на расчистке поверхностей от кустарника и мелких деревьев существенно повышается за счет установки в средней части отвала кусторезного ножа 19.
Поворотные отвалы, применяемые как вспомогательное рабочее оборудование на машинах иного назначения, обычно устанавливают с постоянным углом захвата (углом наклона режущей кромки к направлению движения машины), жестко закрепляя на подъемной раме.
 Бульдозеры с поворотным отвалом, выполняющие планировочные работы, а также очистку поверхностей от строительного мусора, снега и т. п., работают в непрерывном режиме. Отделенный от массива грунт (или другие материалы) перемещается по отвалу вверх и в сторону его наклона в плане по винтовым траекториям 1 (рис. 7.40). При этом призма волочения, увлекаемая потоками грунта, непрерывно перемещается в сторону наклона отвала (направление 2) за его край и укла-Рис. 7.40. Схема формирования дывается в виде валика параллельно с направлением призмы волочения на поворотном движения машины. Такое взаимодействие рабочего ор-в плане отвале гана с грунтом, которое приводит к сдвигу грунта вдоль
Бульдозеры с поворотным отвалом, выполняющие планировочные работы, а также очистку поверхностей от строительного мусора, снега и т. п., работают в непрерывном режиме. Отделенный от массива грунт (или другие материалы) перемещается по отвалу вверх и в сторону его наклона в плане по винтовым траекториям 1 (рис. 7.40). При этом призма волочения, увлекаемая потоками грунта, непрерывно перемещается в сторону наклона отвала (направление 2) за его край и укла-Рис. 7.40. Схема формирования дывается в виде валика параллельно с направлением призмы волочения на поворотном движения машины. Такое взаимодействие рабочего ор-в плане отвале гана с грунтом, которое приводит к сдвигу грунта вдоль
режущей кромки, называют косым резанием. При косом резании возникают дополнительные сопротивления перемещению грунта вдоль отвала.
Техническую производительность бульдозера на планировочных работах (м2/ч) определяют по формуле:
Пт = 3600 L[Bn-b(n- l)]/tT, (7.5)
где L - длина планируемого участка, м; В - ширина захвата, м; п - число полос планировки; Ь -ширина полосы перекрытия между смежными полосами планировки; ?2 - суммарная продолжительность планировки участка, с.
При движении для последующих проходок с разворотами машины:
tz = [3,6L/vp + ty)n + tn(n-l)]z, а при холостом заднем ходе (челночная схема) -
tz = [3,6 L I vp + ty) n + tn (и - 1)] z, где z - число повторных проходок по одному следу.
(7.6)
(7.7)
Из сравнения этих выражений следует, что работа по челночной схеме производительней работы с разворотами машины при условии L < v3X tn I 3,6.
Бульдозеры также используют на грузоподъемных работах, для чего их отвалы оборудуют грузовыми вилами 20 (см. рис. 7.37, д) или траверсами с подъемными крюками 21.
Автогрейдером (рис. 7.41) называют землеройно-транспортную машину на пневмоколесном ходу с отвальным рабочим органом, предназначенную для послойной разработки грунтов I и II категорий и планировки земляных поверхностей при строительстве и содержании автомобильных и железных дорог, аэродромов, при промышленном, гражданском, гидротехническом и ирригационном строительстве. С помощью автогрейдеров профилируют и планируют поверхности при возведении насыпей
высотой до 0,6 м, отрывают и очищают
Рис. 7.41. Автогрейдер
v M F кюветы и канавы треугольного и трапе-
цеидального профилей, сооружают корыта для дорожных оснований, перемешивают и разравнивают грунт, щебень, гравий и вяжущие материалы, а также разрушают дорожные покрытия при ремонте дорог, расчищают от снега дороги и площади.
 В зависимости от массы машины и мощности силовой установки автогрейдеры разделяют на легкие (массой до 9 т и мощностью до 50 кВт), средние (до 13 т, до 75 кВт), тяжелые (до 19 т, до 150 кВт) и особо тяжелые (более 19 т, более 150 кВт). По конструктивному исполнению ходовых устройств они бывают двухосными и трехосными. Особенности конструкции ходового устройства отражаются колесной формулой типа АхВхС, где А, В и С - число осей соответственно управляемых, ведущих и общее. Например, наиболее распространенный в строительстве трехосный автогрейдер с двумя ведущими задними осями и передней осью с управляемыми колеса имеет колесную формулу 1x2x3. По управлению рабочим органом различают автогрейдеры с механической (обычно легкие автогрейдеры) и гидромеханической системами привода.
В зависимости от массы машины и мощности силовой установки автогрейдеры разделяют на легкие (массой до 9 т и мощностью до 50 кВт), средние (до 13 т, до 75 кВт), тяжелые (до 19 т, до 150 кВт) и особо тяжелые (более 19 т, более 150 кВт). По конструктивному исполнению ходовых устройств они бывают двухосными и трехосными. Особенности конструкции ходового устройства отражаются колесной формулой типа АхВхС, где А, В и С - число осей соответственно управляемых, ведущих и общее. Например, наиболее распространенный в строительстве трехосный автогрейдер с двумя ведущими задними осями и передней осью с управляемыми колеса имеет колесную формулу 1x2x3. По управлению рабочим органом различают автогрейдеры с механической (обычно легкие автогрейдеры) и гидромеханической системами привода.
Рабочий орган - отвал 6 - расположен в средней части машины между передними 4 и задними 8 колесами на поворотном круге 7, установленном на тяговой раме 5. Последняя соединена в передней части универсальным шарниром с несущей (хребтовой) балкой 2, жестко соединенной с рамой ведущих (задних) колес и опирающейся шарнир-
но на ось передних колес. Тяговая рама двумя гидроцилиндрами 1 может быть установлена задней частью на любой высоте, а также перекошена в вертикальной плоскости. С помощью специального гидроцилиндра она может быть вынесена в любую сторону, в том числе за пределы колеи машины. Эти кинематические возможности позволяют ориентировать отвал произвольно в плане и в вертикальной плоскости, включая вертикальные перекосы, выносить его в любую сторону от продольной оси движения автогрейдера. Кроме того, разовой установкой отвал можно выдвинуть в сторону относительно тяговой рамы, а также изменить его угол резания. При необходимости отвал дооборудуют специальными приставками, например, для одновременной планировки подошвы и откоса насыпи, бровки и откоса выемки, профилирования придорожных канав и т. п. Для предварительной обработки плотных грунтов автогрейдер оснащают кирковщиком 3, бульдозерным отвалом или другим вспомогательным оборудованием, устанавливаемым в передней части машины и управляемым гидроцилиндрами.
Для придания автогрейдеру поперечной устойчивости, в частности, при работе на косогорах, управляемые колеса способны наклоняться в вертикальной плоскости. Задние колеса устанавливают попарно с каждой стороны на балансирных балках, что в сочетании с шарнирным опиранием хребтовой рамы на переднюю ось обеспечивает опирание на поверхность передвижения всеми колесами машины вне зависимости от микронеровностей рельефа.
Положительной особенностью автогрейдеров как машин для планировочных работ является расположение отвала в средней части машины между передними и задними колесами. При наезде колесами на неровности в полосе движения высотные отклонения режущей кромки отвала будут незначительными, существенно меньшими, чем при консольном расположении бульдозерного отвала. Это качество позволяет планировать земляные поверхности с меньшим числом повторных проходок, чем при работе бульдозера.
Рабочий процесс автогрейдера включает копание грунта, его перемещение и укладку с разравниванием в земляное сооружение. При разработке грунта отвал устанавливают режущей кромкой как параллельно его поверхности, так и наклонно под углом 10 ... 15° с заглублением отвала или только его части по ширине. Угол резания составляет от 35° до 45° соответственно при разработке тяжелых и легких грунтов. При заре-зании отвала в грунт одним концом угол между режущей кромкой отвала и продольной осью машины (угол захвата) принимают равным 35 ... 50°, при отделочных планировочных работах - 45 ... 90°, при копании с отводом грунта в сторону по отвалу - 60°.
В зависимости от размеров обрабатываемого участка, рельефа местности, наличия искусственных сооружений земляные работы с использованием автогрейдеров выполняют движением по круговым и челночным технологическим схемам. Так, в дорожном строительстве при длине обрабатываемого участка (захватки) 400 ... 1500 м автогрейдеры движутся по круговым технологическим схемам, а при меньших длинах - челночным способом - движением в одном направлении вперед, в обратном - задним ходом. При этом в случае очень коротких захваток (около 150 м) грунт разрабатывают только движением вперед, после чего возвращают машину на исходную позицию следующей проходки вхолостую задним ходом на повышенной скорости. При больших длинах захваток грунт разрабатывают как передним, так и задним ходом с разворотом отвала на 180° в плане на концах захватки.
Техническую производительность автогрейдера определяют, как и для бульдозера, по формулам 7.5 - 7.7.
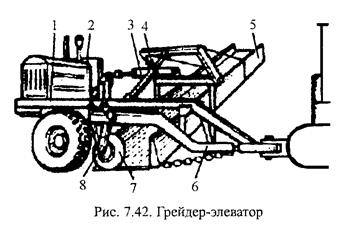
Грейдер-элеваторы являются землеройно-транспортными машинами непрерывного действия. Они предназначены для послойной разработки грунта и возведения из него насыпей высотой до 1,5 м, а также гидромелиоративных сооружений.
Для отделения грунта от массива служит рабочий орган в виде дискового (сферического) ножа, полукруглого ножа или системы плоских ножей, а для его перемещения к месту отсыпки - один или два ленточных конвейера с неизменной ориентацией относительно рамы машины или с возможностью поворота в зависимости от направления отсыпки (разгрузки) грунта. Грейдер-элеваторы могут быть выполнены как навесные, прицепные или полуприцепные технологические орудия к гусеничным или колесным тягачам и тракторам, а также как самоходные ЗТМ.
На рис. 7.42 представлен полуприцепной грейдер-элеватор с плужным диском 7, подвешенным на кронштейне 8 к плужной балке 6, положение которой относительно основной рамы / (при заглублении и выглубле-нии плуга) регулируют гидроцилиндром 3. При движении машины вперед диск вырезает из грунта стружку эллиптического поперечного сечения. Поднявшись по внутренней поверхности плуга, грунт отваливается на ленточный конвейер 5, которым отсыпается в насыпь, отвал или в транспортное средство. Угол наклона конвейера регулируют гидроцилиндром 4. Для перемещения грунта на большие расстояния конвейер наращивают вставками. Гидроцилиндры питаются рабочей жидкостью либо от насосов, установленных на тягаче, либо от собственной насосно-силовой установки 2.
Рабочий процесс грейдер-элеватора состоит из последовательных проходов машины по обрабатываемому участку с разворотами на его концах. Известны также грейдер-элеваторы, работающие по челночной схеме с перестановкой рабочего органа на концах участка (захватки). Эксплуатационную производительность грейдер-элеваторов (м3/ч) при копании грунта прямым и обратным ходами с его разгрузкой в отвал рассчитывают по формуле:
 7 6
7 6
Я, =-
SLknkB
Llvcv+K
/3600'
где S - площадь поперечного сечения вырезаемой стружки, м2; L - длина захватки, м; кп - коэффициент, учитывающий потери грунта при его перегрузке с рабочего органа на конвейер, в среднем кп = 0,85 ... 0,95; кв - коэффициент использования рабочего времени; vcp - средняя скорость передвижения машины, м/с; tn - продолжительность разворота в конце захватки, с.
Особенности рабочих процессов ЗТМ затрудняют полную автоматизацию их управления без участия машиниста. В настоящее время автоматизированы те операции и рабочие движения этих машин, которые в наибольшей мере определяют производительность труда и эффективность их использования. В системах автоматического управления (САУ) ЗТМ обычно используют дискретные электронные системы на основе полупроводниковых элементов, обеспечивающих надежность системы за счет примене-
ния бесконтактных элементов, сравнительно большой срок службы, малые габариты, небольшое потребление энергии, возможность использования простых источников питания. САУ внедрены лишь на части отечественных ЗТМ выпусков последних лет. Значительная часть ЗТМ не имеет такого управления.
САУ ЗТМ решаются задачи стабилизации углового положения ковша или отвала в продольном (относительно продольной оси машины) и в поперечном направлениях, а также высотного положения режущей кромки рабочего органа. Кроме того, решается задача автоматической защиты двигателя от перегрузок.
 Первая задача - стабилизация углового положения рабочего органа в продольном направлении - решается с использованием маятниковых датчиков - преобразователей углового положения (см. рис. 4.8, а), устанавливаемых на продольно расположенных элементах рабочего органа (5 - рис. 7.43 и 4 и 5 - рис. 7.44).
Первая задача - стабилизация углового положения рабочего органа в продольном направлении - решается с использованием маятниковых датчиков - преобразователей углового положения (см. рис. 4.8, а), устанавливаемых на продольно расположенных элементах рабочего органа (5 - рис. 7.43 и 4 и 5 - рис. 7.44).
САУ "Стабилоплан-10" 1 ' '' '' у (см. рис. 7.43) состоит из преоб-
разователя углового положения 5, пульта управления 2, аккумуляторной батареи 3, блока управления 1 и гидрораспредели-Рис. 7.43. Схема размещения приборов системы "Стабило- теля 4 с электрогидравлическим план-10" на скрепере управлением. При отклонении
ковша от заданного положения относительно горизонта маятник преобразователя подает электрический сигнал на блок управления, который после обработки последнего выдает команду электромагнитам ги-дрорапределителя гидравлической системы скрепера, управляющего гидроцилиндрами подъема и опускания ковша. В случае его опускания вследствие неровной поверхности передвижения скрепера гидрораспределитель направляет рабочую жидкость в штоко-вые полости гидроцилиндров (на подъем ковша), а при его подъеме - в их поршневые полости (на опускание ковша).
Система стабилизации отвала бульдозера, являющаяся частью САУ " Комбиплан-10Л" (рис. 7.44), работает в описанном выше режиме. Так же работает САУ поперечной стабилизации углового положения отвала с преобразователем 6.

Автоматические системы с маятниковыми преобразователями стабилизируют объект управления только по одному параметру, в описанном случае - по углу отклонения от заданного положения. Если по каким-либо причинам ковш оказался на отличном от первоначального уровне, то дальнейшая стабилизация будет осуществляться относительно этого нового уровня. Таким образом, рассматриваемая автоматическая система не гарантирует стабилизации по заданному уровню. Этого недостатка лишены копир-ные системы.
Так, в САУ отвала бульдозера "Комбиплан-ЮЛ" подсистемы продольной и поперечной стабилизации рабочего органа работают в автономном режиме, на который САУ переключается с пульта управления 1. При работе же в копирном режиме лазерный луч, исходящий из излучателя 9, питаемого от аккумуляторной батареи 11 и установленного на треноге 10 на расстоянии 5 ... 500 м, воспринимается фотоприемным устройством 8 на штанге 7, закрепленной на отвале бульдозера. При смещении отвала по высоте, а вместе с ним и фотоприемного устройства на электромагниты гидрораспределителей 3 подается соответствующая команда, и гидроцилиндры перемещают отвал до восстановления заданного уровня. На базе одного лазерного излучателя могут работать несколько бульдозеров (до 10), оборудованных системой "Комбиплан-ЮЛ".
Так же работает САУ ковша скрепера "Копир-стабилоплан-10", состоящая из описанной выше системы "Стабилоплан-10" и копирного устройства.
Для управления отвалом автогрейдера применяют САУ "Профиль-1" и "Профиль-2" и заменяющие их системы второго поколения "Профиль-10" и "Профиль-20". САУ "Профиль-1" и "Профиль-10" стабилизируют поперечные уклоны отвала, а САУ "Профиль-2" и "Профиль-20", кроме того - его 6 (рис. 7.45), соответствующий по-
перечному положению отвала 7, сравнивается в полупроводниковом сравнивающем устройстве блока управления 1 с сигналом задатчика. При рассогласовании, превышающем зону нечувствительности системы, усилитель включает золотник 2, переключающий соединения напорной и сливной магистралей гидросистемы с соответствующими полостями  управляемого гидроцилиндра 4.
управляемого гидроцилиндра 4.
САУ "Профиль-20" включает в себя два канала управления - стабилизации углового положения отвала в поперечном направлении и стабилизации его высотного положения относительно копира. Датчик поперечной стабилизации устанавливают на поперечной балке тяговой рамы, а щуповый датчик г на одном конце отвала. Сигнал датчика при отклонении отвала от заданного уровня по высоте преобразуется в команду управления аналогично описанному выше.
В последнее время некоторые модели автогрейдеров оборудуют САУ "Профиль-30", включающей подсистему "Профиль-20", дооборудованную подсистемой стабилизации заданного курса движения автогрейдера путем воздействия на рулевое колесо.
В рассматриваемые САУ включены также подсистемы, обеспечивающие защиту двигателя от перегрузки по снижению частоты вращения коленчатого вала. Для этого служит блок 2 (см. рис. 7.44), который в указанном режиме работы двигателя подает электрический сигнал на выглубление ковша, снижая тем самым его нагрузку.
7.11. Машины для подготовительных работ
Подготовительные работы включают очистку будущей строительной площадки от леса и кустарника, вывозку древесины, корчевку и уборку пней, удаление валунов, устройство временных дорог и мостов через естественные и искусственные препятствия, понижение уровня грунтовых вод и т. п. Для выполнения этих работ применяют машины как общестроительные, так и специальные, используемые в лесотехнической промышленности, ирригационном строительстве и др. Для отдельных видов работ успешно используют сменные рабочие органы, навешиваемые на одноковшовые экскаваторы и бульдозеры. По сходству с устройством бульдозеров для этих работ изготовляют кусторезы и корчеватели-собиратели.
 Кусторезы (рис. 7.46, а) применяют для расчистки подлежащих застройке площадей от кустарников и мелких деревьев, а корчеватели-собиратели (рис. 7.46, б) - для корчевки пней диаметром до 500 мм, расчистки участков от крупных камней, сваленных деревьев и кустарников, а также для рыхления плотных грунтов перед их разработкой землеройными и землеройно-транспортными машинами. Эти машины изготовляют как навесное рабочее оборудование на гусеничных тракторах.
Кусторезы (рис. 7.46, а) применяют для расчистки подлежащих застройке площадей от кустарников и мелких деревьев, а корчеватели-собиратели (рис. 7.46, б) - для корчевки пней диаметром до 500 мм, расчистки участков от крупных камней, сваленных деревьев и кустарников, а также для рыхления плотных грунтов перед их разработкой землеройными и землеройно-транспортными машинами. Эти машины изготовляют как навесное рабочее оборудование на гусеничных тракторах.
Рабочее оборудование кустореза (рис. 7.46, а) представляет собой закрепленный на универсальной раме 4 отвал 2 клинообразной формы с гладкими или пилообразными
ножами 1 в его нижней части. Поднимают и опускают отвал гидравлическими цилиндрами. Рабочий процесс машины обеспечивается ее движением вперед на рабочей скорости с отвалом, скользящим по поверхности или принудительно заглубленным в грунт, срезающим кусты и мелкие деревья и отодвигающим их боковыми поверхностями в стороны. Для защиты от возможного падения деревьев силовая установка и кабина защищены каркасом 3. В зависимости от местных условий выполняют повторный проход по прежнему следу или переходят на смежную полосу. На коротких захватках обычно работают по челночной схеме: рабочее движение - передним ходом, возврат на исходную позицию -задним ходом. На длинных захватках производительнее двигаться в прямом и обратном направлениях в рабочем режиме с разворотами машины на концах захватки.
Рабочее оборудование корчевателя-собирателя (рис. 7.46, б) отличается от рассмотренного отвалом 5 с зубьями в его нижней части. Для работы отвал опускают на грунт и, перемещаясь вперед на рабочей скорости с одновременным заглублением отвала, погружают средние зубья под пень, выдергивая его из земли целиком или частично после нескольких попыток. У некоторых моделей этих машин отвал может поворачиваться относительно рамы в вертикальной плоскости с помощью дополнительных гидроцилиндров, чем облегчается его разгрузка, а при корчевке пней обеспечивается хорошая избирательная способность по направлениям прилагаемых к пню усилий. Сопротивление пней корчеванию находится в прямой зависимости от диаметра пня и составляет от 18 ... 20 до 180 ... 210 кН при диаметрах от 100 до 500 мм соответственно. Полное тяговое усилие корчевателя в рабочем режиме складывается из усилий корчевания, сопутствующего ему разрыхления грунта и самопередвижения.
Производительность корчевателей и кусторезов при сплошной расчистке определяют по формулам (7.5 - 7.7) производительности бульдозеров на планировочных работах, а при избирательной расчистке ее определяют по площади отдельно расчищенных участков с учетом потерь времени на переезды машины от одного участка к другому.
7.12. Машины и оборудование для разработки мерзлых грунтов
При продолжительности зимнего периода от трех до семи месяцев грунт промерзает на глубину от 1 до 2,5 м. Многолетнемерзлые грунты и грунты сезонного промерзания покрывают более 90% территории России. Годовой объем разрабатываемых в нашей стране мерзлых грунтов составляет около 1 млрд. м3. Для непосредственной разработки мерзлых грунтов применяют некоторые модели траншейных экскаваторов, одноковшовых канатных экскаваторов с ковшами активного действия, зубья которых работают независимо от движения ковша в ударном, виброударном или в вибрационном режимах, гидравлические экскаваторы, оснащенные однозубыми рыхлителями или гиромо-лотами, землеройно-фрезерные машин для послойной разработки мерзлых грунтов при строительстве дорог.
Мерзлые грунты, обладающие повышенной прочностью и абразивностью по сравнению с грунтами немерзлого состояния, разрабатывают преимущественно в два
 этапа: предварительным разрыхлением и последующим перемещением или погрузкой в транспортные средства экскаваторами, бульдозерами и погрузчиками - общего назначения или модифицированными для работы в условиях низких температур. Наибольшее распространение в строительстве получили способы механического разрыхления и взрывом. Ниже рассматриваются машины и оборудование для механического разрыхления.
этапа: предварительным разрыхлением и последующим перемещением или погрузкой в транспортные средства экскаваторами, бульдозерами и погрузчиками - общего назначения или модифицированными для работы в условиях низких температур. Наибольшее распространение в строительстве получили способы механического разрыхления и взрывом. Ниже рассматриваются машины и оборудование для механического разрыхления.
Для разрушения мерзлых грунтов с промерзанием на глубину до 0,5 ... 0,7 м применяют Рис. 7.47. Сменное оборудование для раз- специальные снаряды в виде шар-молотов (рис. работки мерзлых грунтов: а - шар-молот; 7.47, а) массой 500 кг и более и клин-молотов б - клин-молот; в - клин-молот с зубьями (рис. 7.47, бив) массой 2000 ... 3000 кг, подвешиваемые на канатах грузовых лебедок гусеничных
кранов и экскаваторов с крановым оборудованием. Снаряд поднимают лебедкой на высоту 6 ... 8 м и сбрасывают на разрабатываемый грунт. Известны также специальные машины на базе гусеничного трактора, в которых вертикально перемещающийся снаряд движется в трубе.
Способ разрушения мерзлых грунтов свободно падающим снарядом, хотя и является наиболее простым, все же широкого распространения не получил из-за низкой производительности (4 ... 10 м3/ч), а также из-за повышенных динамических нагрузок, вредно воздействующих как на базовую машину, так и на близко расположенные коммуникации и сооружения. В настоящее время для подготовки к экскавации больших площадей и объемов мерзлых грунтов наиболее часто применяют навесные рыхлители и щеленарезные машины.
Рыхлители применяют для послойной разработки прочных грунтов, включая мерзлые, многолетнемерзлые и скальные, с последующей уборкой землеройно-транс-портными или погрузочными машинами. Их применяют при отрывке котлованов и широких траншей, устройстве выемок в гидротехническом строительстве, корыт под дорожное полотно, разработке мерзлых россыпей полезных ископаемых, на вскрышных работах.
Различают рыхлители основные и вспомогательные. Основные рыхлители изготовляют как навесное оборудование к гусеничным или пневмоколесным тракторам, а вспомогательные агрегатируют с основным оборудованием ЗТМ и погрузчиков для рыхления плотных грунтов и слежавшихся материалов. Вспомогательные рыхлители позволяют повысить производительность и расширить область применения основного рабочего оборудования. Сменным рыхлительным оборудованием оснащают универсальные строительные гидравлические экскаваторы. В строительстве применяют также бульдо-зерно-рыхлительные агрегаты (см. рис. 7.38), у которых в равной мере используют как бульдозерное, так и рыхлительное рабочее оборудование. Эффективность работы основных рыхлителей зависит от тягово-сцепных свойств базовых тракторов. Наиболее выгодно их использовать для разработки многолетнемерзлых грунтов, трещиноватых и выветренных слоистых или низкопрочных горных пород (сланцев, ракушечников, бурых углей, апатитов, фосфоритов, песчаников, легких и средних известняков и т. п.).
 Как основные, так и вспомогательные рыхлители оборудуют одним или несколькими стойками-зубьями б (рис. 7.48), устанавливаемыми на поперечной балке 2 жестко
Как основные, так и вспомогательные рыхлители оборудуют одним или несколькими стойками-зубьями б (рис. 7.48), устанавливаемыми на поперечной балке 2 жестко
или с возможностью незначительных угловых перемещений в плане через поворотные кронштейны 5, закрепленные на балке шарнирно. При трех зубьях их располагают на одной балке в ряд, при пяти зубьях - в два ряда f- по шахматной схеме. Зубья с поперечной балкой навешивают на базовый трактор через стойку 3 по схеме трехточечной (рис. 7.48, а) или четырехточечной (парал-лелограммной) (рис. 7.48, б) подвесок, регулируя глубину погружения зубьев одним или двумя гидроцилиндрами 4. Параллелограммная подвеска обеспечивает постоянство угла резания независимо от глубины погружения зубьев, что, по сравнению с трехточечной подвеской, позволяет снизить рабочие сопротивления на зубьях, повысить производительность рыхлителя и увеличить срок службы сменных наконечников зубьев /.
Разрыхляют грунт заглубленными в него зубьями тяговым усилием перемещающегося на рабочей скорости трактора. Форма поперечного сечения образованной после проходки рыхлителя выемки показана на рис. 7.49. Для работы в плотных грунтах вы-Рис. 7.49. Поперечное сечение выемки после годнее использовать однозубые рыхлители с проходки рыхлителя жестким креплением зуба на поперечной
балке, которые по сравнению с многозубыми рыхлителями реализуют большие усилия на одном зубе. С этой же целью в тех же условиях многозубые рыхлители переоборудуют в однозубые или снабжают их буферными устройствами, устанавливаемыми в верхней части среднего зуба, для работы с трактором-толкачом, также оборудованным буферным устройством в его передней части. При разработке слоистых горных пород и вялых пластичномерзлых грунтов, а также рыхления корки мерзлого грунта на зубья устанавливают уширители, благодаря чему увеличивается ширина рыхления за каждый проход и повышается производительность машины. Отдельные модели рыхлителей оборудуют дистанционными системами регулирования угла резания и изменения вылета зуба из кабины машиниста для выбора оптимального в конкретных условиях режима работы рыхлителя.
|
из
5.00
|
Обсуждение в статье: Ковшовые конвейеры и подъемники непрерывного действия 12 страница |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы