 |
Главная |


Ковшовые конвейеры и подъемники непрерывного действия 8 страница
|
из
5.00
|
Большую долю в составе сопротивления грунта копанию (для грунтов, разрабатываемых землеройными рабочими органами без предварительного разрыхления - более 80%) составляет сопротивление грунта резанию, которое соответственно изложенной методике определяется как
Рр = Кф с,
где К \ -удельное сопротивление грунта резанию, кПа (см. табл. 7.1).
Другими составляющими сопротивления грунта копанию являются: сила трения между рабочим органом и грунтом, сопротивление перемещению призмы грунта перед рабочим органом (призмы волочения) и сопротивление перемещению грунта в ковш (при ковшовом рабочем органе) или по отвалу (при отвальном рабочем органе).
Сопротивление грунта резанию зависит только от вида грунта и параметров режущего инструмента, в то время как сопротивление копанию, кроме того, зависит от способа разработки (типа землеройной машины), что отражено в табл. 7.1.
7.5. Общая классификация машин и оборудования для разработки грунтов
Машины и оборудование для разработки грунтов классифицируют по назначению - землеройные, землеройно-транспортные, бурильные, оборудование гидромеханизации.
Землеройные машины разрабатывают грунт либо позиционно (одноковшовые экскаваторы и роторные экскаваторы поперечного копания), либо в процессе перемещения всей машины (экскаваторы непрерывного действия, кроме указанных выше роторных). Разработанный грунт либо укладывается в отвал рядом с отрытой выемкой или карьером, либо погружается в транспортные средства для его перевозки.
Землеройно-транспортные машины (бульдозеры, скреперы) работают в двух следующих друг за другом режимах - землеройном и транспортном. Сначала машина в процессе своего перемещения разрабатывает грунт, накапливая его перед отвалом (бульдозер) или заполняя им ковш (скрепер), а затем перемещает его волоком по земле - в случае отвала или в ковше, подобно транспортной машине. Отвальные землеройно-транспортные машины (бульдозеры, автогрейдеры), занятые на планировке земляных поверхностей, работают в режиме землеройной машины непрерывного действия - снимаемый слой грунта непрерывно перемещается по отвалу и укладывается рядом с полосой планировки. В таком же режиме работают землеройно-транспортные машины, называемые грейдер-элеваторами - разработанный ими грунт либо погружается специальным транспортирующим органом в транспортные средства, либо укладывается рядом с полосой разработки.
Бурильные машины предназначены для бурения скважин, включая шпуры. Обычно это машины позиционного действия, что определяется позиционностью скважины. Средства гидромеханизации предназначены для разработки грунтов с использованием скоростного напора струи воды или водяного потока. Они представляются как машинами, так и аппаратами, не имеющими машинного привода.
По характеру рабочего процесса только одноковшовые экскаваторы и скреперы являются машинами цикличного действия. Экскаваторы же непрерывного действия, автогрейдеры, грейдер-элеваторы и оборудование гидромеханизации работают в непрерывном режиме. Бульдозеры могут работать как в цикличном (при послойной разработке грунтов), так и в непрерывном (на планировочных работах) режимах.
Землеройные машины, называемые экскаваторами, могут быть оборудованы одним ковшом (одноковшовые экскаваторы) или несколькими ковшами или заменяющими их рабочими органами - скребками, комбинированными органами для раздельного отделения грунта от массива и выноса его к месту отсыпки, зубьями (без ковшей) и т. п., закрепленными на рабочем колесе (роторе) или на замкнутой рабочей цепи (экскаваторы непрерывного действия). Каждый рабочий орган, как и в случае одноковшового экскаватора, работает в цикличном режиме, но со сдвигом во времени выполнения одноименных операций различными рабочими органами, вследствие чего грунт отсыпается непрерывным потоком.
По сравнению с одноковшовыми экскаваторами экскаваторы непрерывного действия имеют меньшие материалоемкость и энергоемкость, приходящиеся на единицу их
технической производительности, что обусловлено более равномерным нагружением этих машин во времени. В то же время экскаваторы непрерывного действия имеют более низкий коэффициент использования во времени из-за более частых отказов многозвенной структуры этих машин. Являясь специальными землеройными машинами, экскаваторы непрерывного действия имеют узкую область применения по сравнению с одноковшовыми экскаваторами.
Классификации более низких уровней будут приведены при рассмотрении конкретных видов машин.
7.6. Одноковшовые экскаваторы: общие сведения
Одноковшовыми экскаваторами называют позиционные землеройные машины цикличного действия, оборудованные ковшовым рабочим органом. Рабочий цикл одноковшового экскаватора состоит из последовательно выполняемых операций копания грунта, его перемещения в ковше к месту отсыпки, разгрузки ковша с отсыпкой грунта в отвал или в транспортное средство и возвращения ковша на позицию начала следующего рабочего цикла. В совокупности перечисленные операции еще называют экскавацией. После отработки элемента забоя (части грунтового массива в пределах досягаемости рабочего оборудования или, по условиям эффективного использования технологических возможностей экскаватора, несколько раньше) экскаватор перемещают на новую позицию. Совокупность рабочих циклов на одной позиции экскаватора вместе с его перемещением на новую позицию образует большой цикл.
Одноковшовые экскаваторы классифицируют: по назначению (строительные -для производства земляных работ, погрузки и разгрузки сыпучих материалов; строительно-карьерные - для тех же работ и, кроме того, для разработки карьеров строительных материалов и добычи полезных ископаемых открытым способом; карьерные - для работы в карьерах; вскрышные - для снятия верхнего слоя грунта или горной породы перед карьерной разработкой; туннельные и шахтные - для работы под землей при строительстве подземных сооружений и разработке полезных ископаемых); по виду рабочего оборудования (прямая и обратная лопаты - для разработки грунта соответственно выше и ниже уровня стоянки экскаватора; драглайн - для разработки котлованов, траншей и каналов, погрузки и разгрузки сыпучих материалов, вскрышных работ; грейфер - для отрывки глубоких выемок; планировщик - для планирования горизонтальных поверхностей и откосов); по исполнению рабочего оборудования (канатные - с гибкой подвеской; гидравлические - с жесткой подвеской рабочего оборудования); по виду ходовых устройств (пневмоколесные, в т. ч. с использованием автомобильной или тракторной баз, а также специальных шасси автомобильного типа; гусеничные; шагающие - для мощных драглайнов большой массы); по возможности вращения поворотной части (полноповоротные и неполноповоротные); по числу установленных двигателей (одно- и многомоторные).
Кроме перечисленных выше видов экскавационного оборудования одноковшовые экскаваторы могут иметь крановое, сваебойное, трамбовочное и другое сменное оборудование. Экскаваторы, имеющие только один вид рабочего оборудования, называют специальными, а укомплектованные сменными видами рабочего оборудования - универсальными. К последним относится большинство строительных одноковшовых экскаваторов.
Строительные экскаваторы предназначены для разработки грунтов до IV категории включительно без предварительного разрыхления, а также более прочных грунтов, включая мерзлые и скальные, после их разрыхления другими средствами.
Жесткое сочленение элементов рабочего оборудования гидравлических экскаваторов позволяет более полно по сравнению с канатными экскаваторами использовать вес машины для реализации больших усилий на зубьях ковша при оборудовании обратной лопаты и грейфера, благодаря чему основным видом рабочего оборудования этих экскаваторов стала обратная лопата, а не прямая лопата, как у канатных машин. Гидропривод обеспечивает рабочему оборудованию большую маневренность и универсальность, позволяет выбирать более рациональные рабочие движения, обеспечивает передачу движения от двигателя рабочему органу, в том числе с преобразованием вращательного движения в поступательное, простыми техническими решениями. Благодаря существенным преимуществам перед канатными машинами гидравлические экскаваторы в общем объеме производства одноковшовых экскаваторов в нашей стране составляют более 80%.
Гусеничные и шагающие ходовые устройства служат как для перемещения экскаватора на новую стоянку, так и в качестве опорной базы для передачи нагрузок на грунт при экскавации. Пневмоколесные ходовые устройства используют в основном только для передвижения, а при работе экскаватора его устанавливают на выносные опоры, разгружая ходовую часть.
Большинство одноковшовых экскаваторов являются полноповоротными. К не-полноповоротным относятся экскаваторы небольшой мощности на базе пневмоколесных тракторов или короткобазовых погрузчиков (в основном мини-экскаваторы), а также на базе универсальных мотоблоков (микро-экскаваторы).
 Строительные экскаваторы оборудуют преимущественно однодвигательной силовой установкой с механической, гидромеханической или гидравлической трансмиссиями. Карьерные и вскрышные экскаваторы, а также шагающие драглайны оборудуют в основном многомоторным электроприводом постоянного тока с питанием от сети высокого напряжения. Установленная мощность двигателя (силовой установки) гусеничных экскаваторов реализуется полностью на наиболее энергоемкой операции копания грунта, а мощность двигателя пневмоколесных экскаваторов - в траспортном режиме. При копании же этими экскаваторами реализуется примерно 80% установленной мощности. Главным параметром одноковшового экскаватора является его масса, в соответствии с которой экскаваторы подразделяются на размерные группы (табл. 7.2), характеризуемые определенным набором основных параметров (мощностью силовой установ-Табчииа 7 2 ки' вместимостью ковша, усилием на его зубьях, раз-Размерные группы универсаль- мерами рабочей зоны, продолжительностью рабоче-ных одноковшовых экскаваторов г0 «икла> скоростями передвижения, частотой вращения поворотной платформы, преодолеваемыми уклонами, удельным давлением на грунт или нагрузкой на ось, габаритными размерами и др.). Одноковшовые универсальные экскаваторы комплектуют несколькими сменными ковшами различных вмести-мостей для более полного использования энергетических возможностей силовой установки при разработке различных по прочности грунтов, а также другими видами сменного рабочего оборудования.
Строительные экскаваторы оборудуют преимущественно однодвигательной силовой установкой с механической, гидромеханической или гидравлической трансмиссиями. Карьерные и вскрышные экскаваторы, а также шагающие драглайны оборудуют в основном многомоторным электроприводом постоянного тока с питанием от сети высокого напряжения. Установленная мощность двигателя (силовой установки) гусеничных экскаваторов реализуется полностью на наиболее энергоемкой операции копания грунта, а мощность двигателя пневмоколесных экскаваторов - в траспортном режиме. При копании же этими экскаваторами реализуется примерно 80% установленной мощности. Главным параметром одноковшового экскаватора является его масса, в соответствии с которой экскаваторы подразделяются на размерные группы (табл. 7.2), характеризуемые определенным набором основных параметров (мощностью силовой установ-Табчииа 7 2 ки' вместимостью ковша, усилием на его зубьях, раз-Размерные группы универсаль- мерами рабочей зоны, продолжительностью рабоче-ных одноковшовых экскаваторов г0 «икла> скоростями передвижения, частотой вращения поворотной платформы, преодолеваемыми уклонами, удельным давлением на грунт или нагрузкой на ось, габаритными размерами и др.). Одноковшовые универсальные экскаваторы комплектуют несколькими сменными ковшами различных вмести-мостей для более полного использования энергетических возможностей силовой установки при разработке различных по прочности грунтов, а также другими видами сменного рабочего оборудования.
Отечественные универсальные экскаваторы обозначают индексами типа ЭО-0000, в которых первый нуль после буквенной части заменяют цифрами, обозначающими размерную группу; второй нуль - индексом типа ходового оборудования (1 - гусеничное, 2 - гусеничное с увеличенной опорной поверхностью, 3 - пневмоколесное, 4 - специальное шасси автомобильного типа, 5 - шасси грузового автомобиля, 6 - на базе трактора и т. д.); третий нуль - индексом типа подвески рабочего оборудования (1 и 2 - соответственно с гибкой и жесткой подвеской, 3 - телескопическое рабочее оборудование); последний нуль - номером модели экскаватора. Например, ЭО-4123 означает экскаватор строительный универсальный четвертой размерной группы с гусеничным ходовым устройством, жесткой подвеской рабочего оборудования, третьей модели. Очередную модернизацию и климатическое исполнение, как и для стреловых кранов, обозначают буквами русского алфавита.
Техническую производительность (м3/ч) одноковшовых экскаваторов как наибольшую среднюю производительность за 1 ч работы определяют по формуле:
^_ 3600gfc„
^рОц+'пер'Ч) '
где q - вместимость ковша, м3; кн - коэффициент его наполнения; кр - коэффициент разрыхления грунта (см. табл. 7.1); Гц - продолжительность рабочего цикла, с; гпер - продолжительность одной передвижки экскаватора на новую позицию, с; лц- число рабочих циклов на одной позиции.
Продолжительность рабочего цикла определяют суммарным временем, затрачиваемым на выполнение операций с учетом совмещения отдельных рабочих движений. Так, например, если поворот платформы на разгрузку ковша выполняется одновременно с маневровыми движениями рабочего оборудования и при этом продолжительность маневровых движений покрывается временем поворота платформы, то в расчет принимается только время поворотного движения.
Эксплуатационная производительность (м3/сутки, м3/мес, м3/год)
11ъ = 11т ip /св
учитывает продолжительность периода работы экскаватора Тр (ч) и его использование во времени (при односменной работе кв = 0,2 ... 0,25).
7.7. Строительные гидравлические экскаваторы
Основными рабочими органами гидравлических экскаваторов являются ковши обратной и прямой лопат, погрузчика, грейфера. Сменными рабочими органами, расширяющими область применения этих машин, могут быть бульдозерные отвалы для грубой планировки земляных поверхностей, однозубые и многозубые рыхлители для рыхления прочных грунтов, пород и их прослоек, взламывания асфальтовых покрытий при ремонте автомобильных дорог, а также для корчевки пней при освоении рабочих площадок, гидромолоты для тех же работ, крановые подвески, различные модификации грейферов и захватов для работы экскаватора в режиме крана, шнековые буры для рытья колодцев небольших диаметров и др.
В качестве основного для отечественных экскаваторов до 5-ой размерной группы включительно принято рабочее оборудование обратная лопата, а для 6-ой размерной группы - прямая лопата. На экскаваторах устанавливают ковши различной вместимости: основные (типа 02), узкие (01) - меньшей вместимости, для разработки прочных грунтов и широкие (03) - большей вместимости, для слабых грунтов. Ковши всех типов имеют одинаковые размеры профильной проекции и отличаются шириной и числом устанавливаемых на их передней стенке зубьев.
 Строительные неполноповоротные (малые модели) и полноповоротные гидравлические экскаваторы являются самоходными машинами с пневмоколесным или гусеничным ходовым оборудованием. Пневмоколесные экскаваторы используют на рассредоточенных строительных объектах с небольшими объемами работ. Благодаря высокой скорости передвижения (на порядок выше, чем у гусеничных машин), они способны преодолевать большие расстояния при смене строительных объектов. Гусеничные экскаваторы, обладая повышенной проходимостью, передвигаются со скоростью, не превышающей 4-6 км/ч. Этими показателями предопределена область использования гусеничных экскаваторов - объекты с большими объемами земляных работ без специальной подготовки рабочих площадок, включая карьеры. Для перевозки этих машин на большие расстояния используют специальные транспортные средства (тяжеловозы, железнодорожный транспорт и т. п.). Погружается экскаватор на транспортное средство собственным ходом.
Строительные неполноповоротные (малые модели) и полноповоротные гидравлические экскаваторы являются самоходными машинами с пневмоколесным или гусеничным ходовым оборудованием. Пневмоколесные экскаваторы используют на рассредоточенных строительных объектах с небольшими объемами работ. Благодаря высокой скорости передвижения (на порядок выше, чем у гусеничных машин), они способны преодолевать большие расстояния при смене строительных объектов. Гусеничные экскаваторы, обладая повышенной проходимостью, передвигаются со скоростью, не превышающей 4-6 км/ч. Этими показателями предопределена область использования гусеничных экскаваторов - объекты с большими объемами земляных работ без специальной подготовки рабочих площадок, включая карьеры. Для перевозки этих машин на большие расстояния используют специальные транспортные средства (тяжеловозы, железнодорожный транспорт и т. п.). Погружается экскаватор на транспортное средство собственным ходом.
Полноповоротный пневмо-колесный (рис. 7.6, а) или гусеничный гидравлический экскаватор (рис. 7.6, б) состоит из базовой части и рабочего оборудования. При замене последнего базовую часть обычно сохраняют в неизменном виде.
Базовая часть экскаватора включает ходовую тележку с нижней рамой 3 (рис. 7.6), опорно-поворотное устройство 7 и поворотную платформу 6 с расположенными на ней насосно-силовой установкой, узлами гидравлической системы привода и кабиной машиниста 15.
Ходовое оборудование пнев-моколесного экскаватора (рис. 7.6, а) состоит из сварной рамы, опирающейся на два ведущих моста 2 и 4. Для работы в режиме экскавации грунта экскаватор устанавливают на откидные опоры 5, закрепленные на поперечной балке рамы за
режиме используют, кроме прямого назначения, бульдозерный отвал /, установленный перед передним мостом и приводимый гидроцилиндром. Малые модели пневмоколес-ных экскаваторов могут быть оборудованы только бульдозерным отвалом без задних откидных опор.
Колеса мостов приводятся обычно от низкомоментного гидромотора через двух-скоростную коробку передач. Для передвижения по рабочей площадке используют малую, а при межобъектных переездах - повышенную скорость. Трансмиссия ходового устройства оборудована стояночным тормозом.
Каждая из гусеничных тележек 16 (рис. 7.6, б) гусеничного экскаватора приводится в движение гидромотором и зубчатыми передачами. При совместной работе механизмов привода каждой гусеницы в одном направлении обеспечивается прямолинейное передвижение машины, а при их работе во взаимно противоположных направлениях или при работе только одного механизма и заторможенной второй гусенице - поворотное движение (относительно центра опорного контура в первом или относительно центра опорной поверхности заторможенной гусеницы - во втором случае). Во избежание произвольного отката гусеничной тележки при работе экскаватора из-за реактивных нагрузок или уклона рабочей площадки механизм привода гусениц затормаживают или стопорят.
Опорно-поворотное устройство (ОПУ) пневмоколесных и гусеничных экскаваторов, как и у кранов - закрытого шарикового или роликового типа предназначено для передачи на нижнюю раму внешних нагрузок от поворотной части экскаватора и обеспечения вращения последней. Механизм поворота состоит обычно из низкомоментного гидромотора и зубчатого редуктора, на выходном валу которого закреплена шестерня, обеспечивающая через неподвижный зубчатый венец на ОПУ вращение поворотной платформе. Известны также безредукторные устройства с высокомоментыми гидромоторами. Привод поворотного механизма оборудован тормозом для полной остановки поворотной платформы в процессе экскавации, а также для ее стопорения при переездах.
Поворотная платформа выполнена в виде рамной конструкции, способной неограниченно вращаться относительно нижней рамы. Для уравновешивания при работе экскаватора в ее хвостовой части устанавливают чугунный противовес. Для уменьшения последнего расположенная на поворотной платформе насосно-силовая установка и другие наиболее тяжелые агрегаты смещены в ее хвостовую часть. В передней части платформа оборудована стойками-пилонами 8 (рис. 7.6, а) для шарнирного соединения с ней стрелы, а также проушинами для установки одного 9 или двух 19 (рис. 7.6, б) гидроцилиндров привода стрелы. Кабину машиниста с органами управления устанавливают с одной стороны поворотной платформы.
Гидравлическая система (рис. 7.7), наиболее распространенная в отечественных экскаваторах, включает масляный бак 1, двухпоточный регулируемый аксиально-плунжерный насос 2, два блока гидрораспределителей 3 и 4, гидравлические цилиндры привода стрелы 9 и 10, рукояти 8 и ковша 11, гидромоторы привода поворотной платформы 7 и привода двух гусеничных 5 и б или только одного пневмоколесного движителей, калорифер 12 для охлаждения отработавшей рабочей жидкости, фильтры 13 для ее очистки, гидролинии, предохранительные, переливные и обратные клапаны, центральный коллектор для подачи рабочей жидкости от источников на поворотной платформе к гидромоторам ходового механизма на неподвижной нижней раме.

Насос обеспечивает подачу рабочей жидкости по двум независимым напорным магистралям к двум блокам гидрораспределителей, от которых она поступает либо к двум исполнительным гидродвигателям (гидроцилиндрам или гидромоторам), либо, после объединения двух потоков - к одному из них. Обычно потоки объединяются при выполнении наиболее энергоемкой операции рабочего цикла экскаватора - копания. На всех других операциях реализуется двухпоточная схема подачи рабочей жидкости к исполнительным гидродвигателям, обеспечивающая два независимых совмещаемых во времени рабочих движения (подъем или опускание стрелы с одновременным поворотом рукояти или ковша, одновременный поворот рукояти и ковша и т. п.). Качающие узлы насоса управляются автоматически установленным на нем регулятором мощности, стабилизирующим потребляемую мощность за счет изменения подачи насоса: возрастающей при убывании внешнего сопротивления, а следовательно, падении давления рабочей жидкости в напорных магистралях и убывающей при возрастании внешнего сопротивления (давления рабочей жидкости). Так как подача связана со скоростью рабочего движения прямой пропорциональной зависимостью, то использование такой схемы регулирования приводит к сокращению продолжительности рабочих движений, операций и рабочего цикла в целом и, в конечном счете - к увеличению производительности экскаватора.
Обычно в приводе рукояти и ковша устанавливают по одному гидроцилиндру. В приводе же стрелы могут быть как один (обычно для экскаваторов малой мощности 2-й и 3-й, иногда 4-й размерных групп), так и два гидроцилиндра (на экскаваторах 4-й и последующих размерных групп).
Рабочее оборудование обратная лопата (см. рис. 7.6) включает последовательно соединенные между собой шарнирами стрелу 10, рукоять 14 и ковш 13. Стрела, кроме того, шарнирно соединена с поворотной платформой. Вместе с последней элементы рабочего оборудования образуют шарнирно-рычажный четырехзвенный механизм, позволяющий занимать ковшу и режущим кромкам его зубьев различные положения в пределах рабочей зоны экскаватора на всех операциях его рабочего цикла. Рабочее оборудование обратная лопата предназначено для разработки грунтов в основном ниже уровня стоянки экскаватора.
Гидравлический экскаватор с составной стрелой обратной лопаты
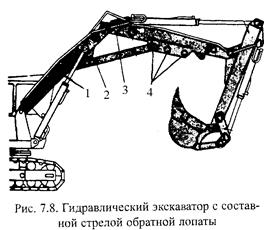 Стрела может быть моноблочной (см. рис. 7.6) и составной (рис. 7.8), состоящей из двух секций: корневой 1, шарнирно соединенной с поворотной платформой, и удлиняющей 3, соединяемой с корневой секцией болтами или шарниром и ригелем 2, перестановкой которого в проушины 4 на удлиняющей секции можно изменять расстояние между концевыми шарнирами стрелы. Чаще составными стрелами комплектуют универсальные экскаваторы. При замене рабочего оборудования обратной лопаты на прямую сохраняют только корневую секцию, а удлиняющую секцию
Стрела может быть моноблочной (см. рис. 7.6) и составной (рис. 7.8), состоящей из двух секций: корневой 1, шарнирно соединенной с поворотной платформой, и удлиняющей 3, соединяемой с корневой секцией болтами или шарниром и ригелем 2, перестановкой которого в проушины 4 на удлиняющей секции можно изменять расстояние между концевыми шарнирами стрелы. Чаще составными стрелами комплектуют универсальные экскаваторы. При замене рабочего оборудования обратной лопаты на прямую сохраняют только корневую секцию, а удлиняющую секцию
либо используют в качестве рукояти прямой лопаты, соответственно перемонтировав ее, либо заменяют новой. Моноблочная стрела (см. рис. 7.6) имет коробчатое поперечное сечение, обычно с разнесенными шарнирами для соединения с поворотной платформой и вилкой на противоположном конце, в ее головной части, для соединения с рукоятью. Стрелу поднимают и опускают одним (рис. 7.6, а) или двумя (рис. 7.6, б и 7.8) гидроцилиндрами, шарнирно соединенными с ней и с передней поперечной балкой поворотной платформы.
Рукоять, также коробчатого поперечного сечения, приводится гидроцилиндром 11 (см. рис. 7.6). На экскаваторах можно устанавливать различные по длине рукояти и удлиняющие секции стрелы.
 Ковш в форме емкости, открытой с одной стороны, с зубьями, установленными в карманы на передней стенке, или без них (для разработки легких грунтов), соединен с рукоятью шарнирно в ее головной части и приводится шарнирно установленным одним концом на рукояти гидроцилиндром 12 непосредственно (рис. 7.6, а) или через шарнир-
Ковш в форме емкости, открытой с одной стороны, с зубьями, установленными в карманы на передней стенке, или без них (для разработки легких грунтов), соединен с рукоятью шарнирно в ее головной части и приводится шарнирно установленным одним концом на рукояти гидроцилиндром 12 непосредственно (рис. 7.6, а) или через шарнир-
но-рычажный механизм (рис. 7.6, б), состоящий из коромысла 18 и тяги 20 и выполняющий функцию мультипликатора. Для предупреждения заклинивания ковшей в траншее на их боковых стенках устанавливают, кроме того, подрезные зубья 17. Кроме обычных экскавационных ковшей (основных, широких и узких) на экскаваторе могут быть установлены ковши для дренажных работ по форме профиля очищаемой выемки.
В зависимости от сочетаний рабочих движений (поворота ковша, рукояти и стрелы, а также вращательного движения поворотной платформы) режущие кромки зубьев ковша могут занимать различные положения в пространстве, совокупность которых называют рабочей зоной Рис. 'l.9. Осевой продольный профиль ра- экскаватора. Рабочая зона полноповоротного бочей зоны гидравлического экскаватора с экскаватора представляется частью пространст-рабочим оборудованием обратная лопата ва, ограниченного тороидальной поверхностью,
радиальное сечение которой, называемое осевым продольным профилем рабочей зоны, представлено на рис. 7.9. По осевому профилю определяют рабочие размеры: максимальные глубину копания Як тах, радиус копания на уровне стоянки экскаватора Лкс_тах и высоту выгрузки Яв тах. Подземная часть рабочей зоны реализуется лишь частично в связи с тем, что по условиям безопасности ведения работ СНиП разрешают копать грунт не ближе 1 м от опорного контура экскаватора при внутреннем откосе KL, составляющем с горизонтом угол от 45° (при глубине выемки 3 м и более в песчаных и влажных гравийных грунтах) до 90° (при глубине до 1,5 м в суглинистых, глинистых и лессовидных грунтах).
Для каждой модели экскаватора существует своя оптимальная (по производительности) глубина копания, равная примерно 2/3 максимальной кинематической глубины копания Нк тах. В числе прочих факторов она определяется условиями разработки наибольшего объема грунта с одной стоянки экскаватора, соответствующими минимальному числу его передвижек, а следовательно, минимуму затрат времени на подготовку машины к передвижке и на ее установку на новой позиции. Этот фактор особенно важен для пневмоколесных экскаваторов из-за необходимости поднимать выносные опоры перед передвижкой и опускать их на новой позиции.
Копают грунт либо поворотом рукояти при фиксированном на ней ковше - от дна выемки вверх, либо поворотом ковша при фиксированных стреле и рукояти, либо совместным поворотом рукояти и ковша. Чаще всего используют первый способ. В конце операции копания для предотвращения от просыпания грунта из ковша на следующей транспортной операции ковш подворачивают к рукояти, после чего рабочее оборудование поднимают стреловым гидроцилиндром. Поворотное движение платформы начинают после того как рабочее оборудование будет выведено из выемки. Одновременно с подъемом стрелы маневровыми движениями рукояти и ковша добиваются установки последнего в конце поворота платформы в положение выгрузки.
Разгружают грунт отворотом ковша от рукояти. Различают разгрузку в отвал и в транспортное средство. В первом случае эта операция не требует полной остановки платформы - разгрузку начинают в конце поворотного движения в прямом направлении и заканчивают в начале возвратного вращения. Во втором же случае, во избежание просыпания грунта при его разгрузке, требуется четкая координация ковша относительно кузова транспортного средства. Для этого платформу останавливают и включают на возвратное вращение только после полной выгрузки ковша. Разгрузка в транспортное средство требует большего времени, чем разгрузка в отвал, а следовательно, она менее производительна по сравнению с последней.
После разгрузки ковша операция возврата рабочего оборудования на исходную позицию для следующего рабочего цикла аналогична операции транспортирования грунта на разгрузку, но выполняется в обратной последовательности указанных движений.
После отработки элемента забоя в пределах допустимой СНиП части рабочей зоны экскаватора последний перемещают на новую стоянку (позицию), предварительно сориентировав рабочее оборудование вдоль гусениц. При межпозиционных передвижках пневмоколесных экскаваторов, кроме того, требуется поднять выносные опоры и бульдозерный отвал, если таким оборудован экскаватор, а на новой позиции установить эти устройства в рабочее положение.
При расчете технической производительности гидравлического экскаватора с рабочим оборудованием обратная лопата продолжительность рабочего цикла (с) определяют как
ta = к + tnr + tp + tnn + tan,
где tK, tnr, tnn, tp и гоп - время (с), затрачиваемое соответственно на копание грунта, поворот платформы с груженым ковшом на разгрузку, собственно разгрузку ковша, поворот платформы с порожним ковшом в возвратном направлении и опускание рабочего оборудования от уровня стоянки экскаватора до положения начала следующего рабочего цикла.
Маневровые движения рабочего оборудования для установки ковша в положение разгрузки обычно совмещаются с поворотом платформы на разгрузку на расчетный угол 90°, а поэтому затрачиваемое на эти движения время в расчетах не учитывается, поскольку оно покрывается временем поворотного движения. По той же причине не учитывается время маневровых движений рабочего оборудования при повороте платформы к забою. Опускают же рабочее оборудование в забой ниже уровня стоянки экскаватора обычно после прекращения поворотного движения.
Проиллюстрируем метод определения составляющих продолжительности рабочего цикла следующим примером.
Пусть требуется определить продолжительность рабочего цикла пневмоколесного гидравлического одноковшового экскаватора с рабочим оборудованием обратная лопата по следующим исходным данным: мощность двигателя Рдв = 55,1 кВт; средний суммарный КПД привода рабочего оборудования г)2 = 0,58; вместимость ковша q = 0,5 м3; разрабатываемый грунт - суглинок; удельное сопротивление грунта копанию ki = 150 кПа; средние скорости вращения поворотной платформы в прямом юср пр = 0,28 с-1 и возвратном соср возвр = 0,3 с-1 направлениях.
Средняя работа операции копания при расчетном коэффициенте наполнения ковша, равном коэффициенту разрыхления грунта, составит:
AK = kxq= 150-0,5 = 75 кДж.
Мощность, затрачиваемая на копание грунта с учетом КПД привода и 80% ее реализации в этом режиме:
рк = ^дв 41 0,8 = 55,1-0,58-0,8 = 25,57 кВт.
Расчетная продолжительность копания:
'к = aJPk = 75 I 25.57 = 2,93 с.
Продолжительность поворота платформы на расчетный угол соповрасч = те/2 рад в прямом ('пов.пр) и возвратном (гпов в03вр) направлениях:
|
из
5.00
|
Обсуждение в статье: Ковшовые конвейеры и подъемники непрерывного действия 8 страница |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы