 |
Главная |


Структура гирокомпаса на динамически настраиваемом гироскопе. Особенности работы прибора
|
из
5.00
|
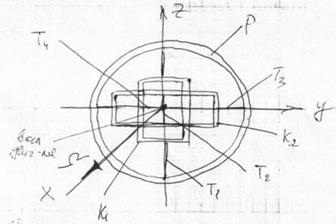
Гскоп с упругим внутренним подвесом. Ротор Р устан. в упрг.внутр. кордановом подвесе с пом. 2-х колец К1 и К2 и связанных с ними 4-х пар торсионов Т1-Т4. Торсионы имеют выс. жесткость при изгибе и опред.заданую жесткость при закручивании. Благодаря торс-ам Гскоп может поворачив-ся на огран.углы вокруг осей ОУ и ОZ. Кольца К1 и К2 в нераб. сост-ии находятся в практически одной плоскости. Ротор Р вращ-ся вместе с сист-ой подвеса с соответ-ей угловой скоростью Ω, направлен-й по оси Х, с помощью приводного двигателся, кот. Связан с валом двигателя.
Ур-е движ-я ДНГ вокруг основ-я (если пренебречь моментами вязкого трения:
IЭα˝+( Iор + Iэк)Ωβ’ + ((Iок - 2Iэк )Ω2 + 2с)α=0
IЭβ˝+( Iор + 2Iэк)Ωα’ + ((Iок - 2Iэк )Ω2 + 2с)β =0
IЭ – результ. Момент инерции подвижн. Части относ-но экв-ой оси
Iор – осев. Момент инерц. Ротора.
Iок - осев. Момент инерции кольца подвеса
Iэк – экват. Момент инерц. Кольца относ-но экватор.оси
Ω - углов. Скорость вращения ротора
С – коэф. Жесткости торсионов
α β – углы поворота относ-но осей ОУ и ОZ
Ротор в этом случае находится под действием момента антиупругости
(Iок - 2 Iэк ) Ω2 α
(Iок - 2 Iэк ) Ω2 β Центробежн. Моменты (всегда имеют отрицат.знак, т.к. 2 Iэк > Iок
2 с α
2 с β Моменты упругости, всегда +, действуют в сторону уменьшения угла откл. И не зависят от Ω
Все это позволяет обеспечить системе, имеющей упругий подвес нулевое значение момента при соблюдении условия:
(Iок - 2 Iэк ) Ω2 + 2С=0 – условие ДНГ
Вывод: при обеспечении динам.настройки в Гскопе возникает такое состояние, при кот. Упруг. Подвес обеспеч-ет центрирование ротора по всем направлениям не налагает на него каких-либо упругих восстан-их моментов при любых его угловых отклонениях.
Особенность: совершенно новый тип подвеса – упругий.
Подбирают угловую скорость т.о., чтобы компенсировать момент подвеса
Более точный
Экспл.: 1) ускоренный приход в меридиан 40-50минут
2) автоматич. Переход в режим гироазимута
3) нет погрешности за счет термостабилизации
3.Сущность влияния мелководья на движение судна. Способы определения проседания и потери скорости на мелководье.
Практикой установлено, что на мелководье по сравнению с глубокой водой резко ухудшается эксплуатационная устойчивость судна на курсе, повышается рыскливость; заметно ухудшается и поворотливость судов.
На мелководье резко уменьшаются углы дрейфа, угловая скорость поворота и соответственно увеличивается радиус установившейся циркуляции при одинаковых углах перекладки руля.
Влияние мелководья начинает заметно сказываться при переходе за скорости, равные 0,6Vкр когда высота и длина создающихся при движении судна поперечных волн начинают резко возрастать. По мере увеличения скорости увеличивается и угол, составляемый гребнями волн с ДП судна. Вместе с ростом волнообразования растет и сопротивление воды движению судна, перегружается двигатель, возрастает расход топлива, повышается износ двигателя.
Уменьшение угла дрейфа на мелководье является благоприятным обстоятельством, поскольку оно позволяет увеличивать размеры судов для беспрепятственного прохождения лимитирующих поворотов. Снижение падения скорости на циркуляции в условиях мелководья объясняется резким уменьшением углов дрейфа.
Увеличение сопротивления воды приводит не только к уменьшению инерционности судна, но и к снижению его начальной (установившейся) скорости при одинаковой частоте вращения винта.
Увеличение присоединенных масс и моментов инерции на мелководье увеличивает пропорционально инерционность судна и частично компенсирует влияние увеличения сопротивления воды. Кроме того, увеличение присоединенного момента оказывает стабилизирующее влияние на траекторию судна при свободном и активном торможении.
При движении на мелководье коэффициент упора винта по сравнению с глубокой водой увеличивается.
Кроме того, на мелководье возникает необходимость снижения частоты вращения винта вследствие перегрузки двигателя.
При активном торможении на мелководье возможно как относительное сокращение тормозного пути, так и его увеличение по сравнению с той же начальной скоростью на глубокой воде.
условиях.
Просадка судна DН=U(2V+U)/2g, где U – скорость встречного потока, V – скорость судна.

 - потеря скорости. - при 1.5<Н/Тср<4
- потеря скорости. - при 1.5<Н/Тср<4

-при Н/Тср<1.4, увеличение средней осадки, К – коэф., зависящий от L/B
Билет 28.
 1.Определение широты по меридиональной высоте светила.Если светило находится на меридиане наблюдателя, то его высота является меридиональной H. В этом случае легко получить широту. Напоминаем, что высота h наименование не имеет. Но если светило находится на меридиане наблюдателя, то меридиональная высота H одноименно с точкой (N или S), над которой измеряется высота. В этом же случае зенитное расстояние Z = 90 - H разноименно с H. Рассмотрим на следующем рисунке несколько вариантов кульминации светила и выведем формулу для нахождения широты. φ= Z ±δ. Порядок наблюдений и вычислений. Снять с карты примерно на Тс = 12ч00м приближенную долготу. Рассчитать судовое время кульминации Солнца. Для этого из МАЕ по дате выбирается время кульминации. Долготу переводим в часовую меру при помощи таблицы в МАЕ на 288 странице. На этом же этапе планирования наблюдений, зная гринвичское время кульминации, по МАЕ необходимо выбрать склонение Солнца. Приблизительно за 5 минут до момента кульминации выйти на наблюдения и начать измерение до тех пор пока высота не начнет уменьшаться, за меридиональную принять максимальную из измеренных, при этом заметить над какой точкой горизонта были произведены измерения (N или S). Необходимо так же указать измеренный край диска, записать поправку индекса и инструментальную поправку секстана, высоту глаза, а также если высота менее 30°, то температуру и давление воздуха. Рассчитать широту. Достоинства и недостатки метода. Простота и малый объём вычислений. Для Солнца этот метод можно использовать только один раз в сутки. Неблагоприятные гидрометеоусловия в момент кульминации не позволяют применить данный способ. Данным способом можно определить только одну координату - широту.
1.Определение широты по меридиональной высоте светила.Если светило находится на меридиане наблюдателя, то его высота является меридиональной H. В этом случае легко получить широту. Напоминаем, что высота h наименование не имеет. Но если светило находится на меридиане наблюдателя, то меридиональная высота H одноименно с точкой (N или S), над которой измеряется высота. В этом же случае зенитное расстояние Z = 90 - H разноименно с H. Рассмотрим на следующем рисунке несколько вариантов кульминации светила и выведем формулу для нахождения широты. φ= Z ±δ. Порядок наблюдений и вычислений. Снять с карты примерно на Тс = 12ч00м приближенную долготу. Рассчитать судовое время кульминации Солнца. Для этого из МАЕ по дате выбирается время кульминации. Долготу переводим в часовую меру при помощи таблицы в МАЕ на 288 странице. На этом же этапе планирования наблюдений, зная гринвичское время кульминации, по МАЕ необходимо выбрать склонение Солнца. Приблизительно за 5 минут до момента кульминации выйти на наблюдения и начать измерение до тех пор пока высота не начнет уменьшаться, за меридиональную принять максимальную из измеренных, при этом заметить над какой точкой горизонта были произведены измерения (N или S). Необходимо так же указать измеренный край диска, записать поправку индекса и инструментальную поправку секстана, высоту глаза, а также если высота менее 30°, то температуру и давление воздуха. Рассчитать широту. Достоинства и недостатки метода. Простота и малый объём вычислений. Для Солнца этот метод можно использовать только один раз в сутки. Неблагоприятные гидрометеоусловия в момент кульминации не позволяют применить данный способ. Данным способом можно определить только одну координату - широту.
2.Принцип действия и структурная схема индукционного лага. Погрешности лага и их устранение.
Принцип действия ИЛ основан на законе электромагнитной индукции. Датчиком сигнала, пропорционального скорости судна, является индукционный преобразователь (ИП). При движении судна поток морской воды обтекает торцевую поверхность корпуса ИП. На этой поверхности расположены 2 электрода. Линия, соединяющая электроды, перпендикулярна ДП судна. Расстояние между электродами обозначено b. Внутри корпуса ИП имеется вертикальный электромагнит, обмотка которого питается переменным током. Электромагнит создает магнитное поле с индукцией B, которое перемещается вместе с судном относительно воды. Морская вода является проводником тока, поэтому в ней наводится электродвижущая сила ЭДС :
е = - dФ/dt, где Ф –магнитный поток, Ф=BS, здесь S-площадь сечения магнитного потока. Электромагнит питается переменным током, поэтому магнитная индукция: B=Bm*sinωt (ω=2*π*f). Морская вода, находящаяся между электродами, образует проводник длиной b. При движении судна со скоростью V за некоторое время dt этот проводник пройдет путь Vdt, а S магн потока он пересечёт за это время: dS=bVdt. è
Uип =-Bm*S*ω*cosωt-Bm*b*V*sinωt.
Uип = Uk + Uc
Uk -Квадратурная погрешность при преобразовании напряжения Uип отделяется от полезного сигнала и исключается, т.к. она сдвинута по фазе на п\2 по отношению к полезному сигналу.
Uc – полезный сигнал, зависящий от скорости судна
Точность показаний лага в большой степени зависит от места установки ИП. Это объясняется прежде всего возникновением вблизи поверхности корпуса движущегося судна турбулентного слоя воды, имеющего неодинаковую толщину случайное поле скоростей частиц жидкости. Кроме того распределение магнитной индукции В в объёме воды неодинаково по длине судна и носит весьма сложный характер. Эти и другие случайные факторы приводят к тому, что измеренная лагом скорость не соответствует истинной скорости судна, причем связь между этими скоростями имеет нелинейный характер. Типовая схема индукцинного лага 
ПАС(преобраз. анал.-цифровой):1)усиление полезного сигнала
2)подавление помех, сопровождающих сигнал
3)усиление и регулировка опорного сигнала
4)фазовое детектирование двух сигналов
5)выработка дополнительных U необходимых для работы лага
ПНВ(преобразователь напряжение-время) предназн. для преобраз. сигнала Uс в прямоугольный импульс с врем. интервалом пропрц. Vc, который осущ. двойным интегрированием с использ. Uоп (сначала интегр отриц Uc, затем полож Uоп- тем самым искл влияние судовой сети
ПВЦ(преобразователь время-цифра)-здесь происходит измер длительности импульса(для этого используются счётные импульсы высокой частоты)
Аналоговая часть( УП, резисторы для дискретного изменен k усиления, УИК, УОК):1) усиление и преобразование Uип
2)выработка, усиление и преобразование Uоп
УИК: 1) преобраз переменного тока в постоянный методом синхронного детектирования
2)подавление квадратурной помехи
УОК: 1)выработка Uоп и создание ПИ, управляющих электронными ключами
|
из
5.00
|
Обсуждение в статье: Структура гирокомпаса на динамически настраиваемом гироскопе. Особенности работы прибора |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы