 |
Главная |


Высотная линия положения, ее уравнение. Свойства высотных ЛП
|
из
5.00
|
Линией положения называется касательная, проведенная к изолинии вблизи счислимого места и замещающая собой изолинию.
Уравнение изолинии имеет следующий вид Δφcos τ+ Δwsinτ= n, τ- направление градиента, n = (Uo - Uc)/g - перенос,g - модуль градиента навигационного параметра. Касательная к кругу равных высот является высотная линия положения - ВЛП. Уравнение ВЛП имеет следующий вид: ΔφcosА + ΔwsinА = n = ho - hc Свойства ВЛП. ВЛП - это приближенная линия. Градиент ВЛП равен 1. Положение ВЛП на карте не зависит от принятых счислимых координат. Аналитический метод ОМС. Аналитический метод ОМС основан на расчете элементов 2-х ВЛП - азимутов и переносов (ручным методом или с использованием программирумых микрокалькуляторов) и на аналитическом расчете системы уравнений 2-х ВЛП ΔφcosA1 + Δ WsinA1 = n1
Δ φcosA2 + Δ WsinA2 = n2 Δφ- приращение широты относительно счислимого места, ΔW - приращение отшествия относительно счислимого места. Δ φ = DΔ φ/D и Δw = DΔw/D Знак "+" величины Δ φ означает, что РШ направлена к N, а если получается знак "-", то РШ направлена к S. Знак "+" величины Δозначает, что ОТШ направлена к E, а знак "-", что ОТШ направлена к W. Переведем отшествие в разность долгот по формуле Δλ= Δw/cos φ Найдем обсервованные координаты: φо = φс + Δиλо = λс + Δλ
Общая характеристика антенн гидроакустических. приборов. Технические параметры антенн.
По характеру изл. антенны делятся на: точечные (не созд. направл-го излучения, интенсивность одинакова во всех направл.), сплошные(изл. определенной направленности), антенные решетки.
Чувствительность – пар-р приемной антенны – отношение напр. на входе антенны к воздействующему на неё звуковому давлению. Она настраивается на опр. резонансную частоту, при которой чувствит.max.
Звуковая энергия может возникнуть в рез-те преобразования энергии одного вида в другой. В гидроакустике это решается с помощью преобразователей.
Ферромагнитные преобразователи работают на эффекте магнитострикции: изменение размеров при изменении магнитного состояния.
Различ. не, и поляризованные магнито-стрикционные преобразователи. Поляриз. питаются постоянным и переменным током, амплитуда кот. меньше амплитуды подмагничивания.
В наст время нашли применение нашли применение более совершенные преобраз. на пьезо эффекте. При подаче напр. на эл-ды происходит их деформация и наоборот.
«+»-хорошие экспл. показ., дешевизна.
3.Определение скорости буксировки судов при ветре и волнении. Длина буксирной линии.
Скорость буксировки в обычных условиях определяют расчетом сопротивления воды и воздуха движению буксируемого и буксирующего судам. Суммарное сопротивление определяется упором гребного винта буксирующего судна: R=R0+R1=Pш, где R – общее сопротивление каравана; R0 – сопротивление буксирующего судна; R1 – сопротивление буксируемого судна; Рш – упор гребного винта на швартовах.
Сопротивление буксирующего судна равно сумме сопротивлений: R0=Rf+Rr+Rвозд+Rволн
Rj – сопротивление трения; Rr – остаточное сопротивление; Rвозд – сопротивление воздуха; Rволн – сопротивление от волнения.
Сопротивление буксируемого судна
R1=R’f+R’r+ R’возд+R’волн + R’винт+Rтр,
R’винт – сопротивление винта; Rтр – сопротивление буксирного троса.
Упор гребного винта на швартовах
 Где Рв – мощность, потребляемая гребным винтом, Нв – шаг винта, Dв – диаметр винта, n – частота вращения винта.
Где Рв – мощность, потребляемая гребным винтом, Нв – шаг винта, Dв – диаметр винта, n – частота вращения винта.
Расчет длины буксирной линии. 1. должна обеспечивать хорошую управляемость. 2. Буксируемое судно не должно испытывать влияния кильватерной струи буксировщика. 3. Она д.б. такой, чтобы за счет упругой «весовой игры» обеспечить изменение расстояния м/д судами на величину высоты волны.l=FгhB/10ki ;Fг – тяга на гаке
hB-высота волны
ki коэф игры буксирного троса
Упругое удлтнение синтетического троса
Δl=l√(F/αPразр)
F - Усиление,растягивающее трос
P - Разрывное усидие
a - Коэфф.
Билет 23.
1.Устройство и теория навигационного секстана. Исправление высот светил, измеренных секстаном.
Исправлением высот называют переход (путем введения поправок) от измеренных высот к истинным геоцентрическим (обсервованным) высотам. Общая формула исправления высот имеет следующий вид:
ho =OC+(i+s)+Δhd+Δhρ+Δhp±R+Δht+Δhв
Поправка за наклонение горизонта.
Явление преломления лучей какой-либо средой называется рефракцией. Преломление луча света от светила в земной атмосфере называется астрономической рефракцией, а преломление луча от удаленных земных предметов - земной рефракцией. Высоты светил в море измеряют над линией видимого горизонта. Видимый горизонт представляет малый круг на поверхности моря, описанный лучом зрения, по которому наблюдатель с возвышения глаза е увидит наиболее удаленную точку поверхности моря. Угол между плоскостью истинного горизонта и касательной к лучу, направленного от видимого горизонта называют наклонением видимого горизонтa (Δhd).Для получения видимой высоты над истинным горизонтом (hв) наклонение видимого горизонта надо вычесть из измеренной высоты (hиз). Наклонение видимого горизонта зависит от коэффициента земной рефракции χ, среднее значение которая равно 0,16, радиуса Земли и высоты глаза. Итоговое значение наклонения горизонта определяется формулой (в дуговых минутах).Δhd=√e
Поправка за астрономическую рефракцию.
Проходя через земную атмосферу, лучи света изменяют прямолинейное направление. Вследствие увеличения плотности атмосферы преломление световых лучей усиливается по мере приближения к поверхности Земли. В результате наблюдатель видит небесные светила как бы приподнятыми над горизонтом на угол, получивший название астрономической рефракции (р). Величина рефракции зависит от многих факторов и может изменяться в каждом месте на Земле даже в течение суток. Для средних условий получена приближенная формула рефракции: Δhρ= -0,9666ctghв Коэффициент 0,9666 соответствует плотности атмосферы при температуре t=+10° и давлении В=760 мм.рт.ст. Если характеристики атмосферы другие, то поправку за рефракцию, расчитанную по данной формуле необходимо корректировать поправками за температуру и давление .
Поправка за параллакс. Если измеряется высота светила, расстояние до котоорого сопостовимо с размерами Земли, то видимая высота hв будет меньше геоцентрической высоты, т.е. из центра Земли. Параллаксом называют угол между направлениями на светило с поверхности и из центра Земли, или угол при светиле, под которым был бы виден радиус Земли для данного наблюдателя со светила. В течение суток величина параллакса меняется от максимального значения для положения светила на горизонте и называемого горизонтальным параллаксом до нуля при положении светила в зените. Вследствие эллипсоидальности Земли величина горизонтального параллакса для наблюдателя на экваторе, где радиус Земли максимален, будет самой большой. Такой параллакс называют горизонтальным экваториальным параллаксом po, он приводится в МАЕ Параллакс зависит также от расстояния до светила, поэтому достигает заметных величин только для наиболее близких к Земле светил. Наибольший параллакс имеет Луна (61,5'), параллакс Венеры колеблется от 0,1' до 0,6', параллакс Марса - от 0,1' до 0,4'; для Солнца в среднем рo= 0,15' параллаксы Юпитера и Сатурна меньше 0,1'. Значения горизонтального экваториального параллакса планет даны в ежедневных таблицах МАЕ, ниже колонки склонений, а для Луны в нижнем углу правой страницы. Поправка за параллакс определяется формулой: Δhр=pocoshв Поправка за параллакс всегда имеет положительный знак.
Поправка за полудиаметр.
При измерении высот Солнца и Луны с горизонтом совмещают край диска светила. Для получения высоты его центра необходимо к высоте нижнего края прибавить угловой полудиаметр, а из всоты верхнего края - вычесть его. Угловой полудиаметр Солнца изменяется в течении года от 15,8' до 16,3' и приводится в МАЕ и ВАС-58.Угловой полудиаметр Луны зависит от расстояния между Луной и Землей, следовательно, его можно выразить через параллакс: sinR = 0,2725sinpo
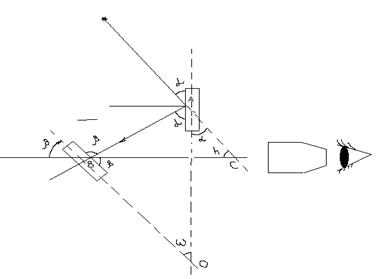 Секстан. Из треугольника АВС: h+2α=2β, h=2β-2α . h=2(β-α). Из треугольника ОАВ: ω+α=β; ω=β-α. h=2ω, ω=h/2.
Секстан. Из треугольника АВС: h+2α=2β, h=2β-2α . h=2(β-α). Из треугольника ОАВ: ω+α=β; ω=β-α. h=2ω, ω=h/2.
2.Скоростная девиация гирокомпасов и способы ее устранения.
По своему характеру погрешности гирокомпаса принято делить на методические и инструментальные. Основными методическими погрешностями являются скоростная и инерционная
Скоростной погрешностью гирокомпаса называется постоянное в данной широте азимутальное отклонение оси гирокомпаса от истинного меридиана, происходящее вследствие движения судна с постоянной скоростью на постоянном курсе.
Скоростная погрешность имеет полукруговой характер, для курсов северной половины горизонта она отрицательна, южной — положительна, то есть зависит от скорости, широты и курса судна. В большинстве конструкций гирокомпасов она исключается автоматическими или полуавтоматическими корректорами, аналитическим методом с помощью вычислительного устройства, которое формирует корректирующие моменты и действуют на гиросферу. Sinδ=(V*cosKK)/(Rз*w*cosφ)
3.Действия экипажа при посадке на мель. Снятие с мели с посторонней помощью.
1. Объявляют общесудовую тревогу и поднимают сигнал, предписанный МППСС—72 для судна, стоящего на мели.
2. Замечают курс и скорость, на которых судно коснулось мели (если это произошло в шторм, курс и скорость должны быть замечены сразу после посадки).
З. Определяют координаты места посадки.
4. Тщательно замеряют уровни воды в междудонных отсеках и льялах.
5. Замеряют глубину ручным лотом вокруг корпуса судна и определяют характер грунта.
6. Если позволяет погода, на воду спускают шлюпку под командованием одного из помощников капитана. Со шлюпки как можно точнее замечают осадку судна.
7. Устанавливают радиосвязь с находящимися поблизости суда ми, позиции которых наносят на генеральную карту.
8. В случае посадки на мель в штормовую погоду принимают меры к закреплению судна на мели путем затопления отсеков.
9. В ближайшую службу погоды или капитану ближайшего порта посылают запрос о прогнозе погоды на текущие и несколько последующих суток.
10. Рассчитывают среднюю осадку судна, которую оно имело на плаву к моменту посадки на мель.
11. Определяют: стадию прилива или отлива, соответствующую моменту посадки на мель, время ближайших полной и малой вод, величину прилива, направление и скорость приливно-отливного течения.
12. С момента посадки на мель в судовом журнале ведут последовательные, подробные и точные записи всех мероприятий и событий на судне.
13. Если машинно-котельное отделение не получило повреждений при посадке на мель, туда дают указание поддерживать в пол ной готовности все судовые механизмы.
Существуют следующие способы снятия с мели с посторонней помощью. Буксировка. Разворот судна , сидящего на мели. Разворачивающее усилие определяется по формуле:
Тразв=КнSМf/xразв, где Кн – коэф. надежности, когда длительное пребывание судна на мели может привести его к гибели =1,1,
SМf=Мfтр+Мfбгр+Мfволн, где Мfтр – момент сил трения, Мfбгр – момент сил бокового сопротивления грунта, Мfволн,– момент сил бокового волнового давления, хразв - расстояние от точки приложения разворачивающего усилия до тачки разворота.
Если статические тяговые усилия буксирующими судами, оказались недостаточными для снятия судна с мели, прибегают к динамическому рывку буксировщика.
Билет 24.
 Определение широты по высоте Полярной звезды.
Определение широты по высоте Полярной звезды.
 Высота полюса мира над горизонтом всегда равна широте места. Пусть Полярная звезда находится в произвольной точке С. Из данной точки опустим сферический перпендекуляр на меридиан наблюдателя. Величина х - есть проекция полярного расстояния на меридиан наблюдателя. Так как полярное расстояние мало (44'), то прямоугольный треугольник PNCD можно считать плоским. Из данного прямоугольного треугольника имеем x = Δcostм Из рисунка видно, что φ= ho - x (*) На основании основной формулы времени, имеем x = Δсos(Sм -α). Подставляя в формулу (*) значение х, получаем φ = ho - Δсos(Sм - α) Введём обозначения I = - Δo сos(Sм - α o) (**) α o и Δo - среднегодовые значения прямого восхождения и полярного расстояния Полярной звезды. Окончательно широта по высоте Полярной звезды определяется следующей формулой: φ= ho + I + II + III Поправка I выбирается из МАЕ из таблицы "Широта по высоте Полярной звезды" на страницах 277-278. Поправка II выбирается из МАЕ из таблицы "Широта по высоте Полярной звезды" на странице 279 по аргументам Sм и h. Поправка III выбирается из МАЕ из таблицы "Широта по высоте Полярной звезды" на странице 280 по аргументам Sм и дата. Порядок наблюдений и вычислений. . В навигационные сумерки найти Полярную звезду над точкой N на высоте h
Высота полюса мира над горизонтом всегда равна широте места. Пусть Полярная звезда находится в произвольной точке С. Из данной точки опустим сферический перпендекуляр на меридиан наблюдателя. Величина х - есть проекция полярного расстояния на меридиан наблюдателя. Так как полярное расстояние мало (44'), то прямоугольный треугольник PNCD можно считать плоским. Из данного прямоугольного треугольника имеем x = Δcostм Из рисунка видно, что φ= ho - x (*) На основании основной формулы времени, имеем x = Δсos(Sм -α). Подставляя в формулу (*) значение х, получаем φ = ho - Δсos(Sм - α) Введём обозначения I = - Δo сos(Sм - α o) (**) α o и Δo - среднегодовые значения прямого восхождения и полярного расстояния Полярной звезды. Окончательно широта по высоте Полярной звезды определяется следующей формулой: φ= ho + I + II + III Поправка I выбирается из МАЕ из таблицы "Широта по высоте Полярной звезды" на страницах 277-278. Поправка II выбирается из МАЕ из таблицы "Широта по высоте Полярной звезды" на странице 279 по аргументам Sм и h. Поправка III выбирается из МАЕ из таблицы "Широта по высоте Полярной звезды" на странице 280 по аргументам Sм и дата. Порядок наблюдений и вычислений. . В навигационные сумерки найти Полярную звезду над точкой N на высоте h  φ. Измерить секстаном её высоту (ОС) и заметить момент времени по хронометру. Записать Тс, отсчет лага ОЛ, по отсчету лага снять счислимые координаты. Записать высоту глаза, поправку индекса и инструментальную погрешность секстана, поправку хронометра и если надо, то температуру и давление воздуха. Рассчитать приближенное гринвичское время и гринвичскую дату. Рассчитать точное гринвичское время, с ним войти в МАЕ и рассчитать звездное местное время. Исправить отсчет секстана поправками и рассчитать обсервованную высоту Полярной звезды. Далее, войти в МАЕ в таблицу "Широта по высоте Полярной звезды" со звездным местным временем и выбрать поправки I, II и III. Фрагменты этой таблицы с выборками поправок I, II и III представлены ниже. Прибавляя поправки к обсервованной высоте, получить обсервованную широту. Достоинства и недостатки метода. Рассчитывав широту, её можно использовать, как высотную ЛП, которая будет проходить по параллели. На Полярной звезде судоводители экономят до 40% времени вычислений - в этом и заключается преимущества использования Полярной звезды для ОМС по нескольким звездам. К недостатку данного метода можно отнести его ограниченность по широте. Его можно использовать только в северном полушарии (наиболее благоприятный диапазон широт 5°N < φ< 65°N). В южном полушарии вблизи южного полюса нет яркой приполярной звезды.
φ. Измерить секстаном её высоту (ОС) и заметить момент времени по хронометру. Записать Тс, отсчет лага ОЛ, по отсчету лага снять счислимые координаты. Записать высоту глаза, поправку индекса и инструментальную погрешность секстана, поправку хронометра и если надо, то температуру и давление воздуха. Рассчитать приближенное гринвичское время и гринвичскую дату. Рассчитать точное гринвичское время, с ним войти в МАЕ и рассчитать звездное местное время. Исправить отсчет секстана поправками и рассчитать обсервованную высоту Полярной звезды. Далее, войти в МАЕ в таблицу "Широта по высоте Полярной звезды" со звездным местным временем и выбрать поправки I, II и III. Фрагменты этой таблицы с выборками поправок I, II и III представлены ниже. Прибавляя поправки к обсервованной высоте, получить обсервованную широту. Достоинства и недостатки метода. Рассчитывав широту, её можно использовать, как высотную ЛП, которая будет проходить по параллели. На Полярной звезде судоводители экономят до 40% времени вычислений - в этом и заключается преимущества использования Полярной звезды для ОМС по нескольким звездам. К недостатку данного метода можно отнести его ограниченность по широте. Его можно использовать только в северном полушарии (наиболее благоприятный диапазон широт 5°N < φ< 65°N). В южном полушарии вблизи южного полюса нет яркой приполярной звезды.
2.Методы ОМС по ИСЗ. Общая хар-ка СНС “Навстар” и “Глонасс”
Одним из методов ОМС по ИСЗ, является псевдодальномерный метод ОМС, он базируется на уравнении дальномерного метода Di=C*ti (8.1),где ti = tпрi – tизлi – время распространения сигнала от i спутника до потребителя. tпрi – момент приема сигнала от i спутника, фиксируемый по часам приемоиндикатора. tизлi - момент излучения сигнала i спутником, сообщается спутником. Очевидно, что степень согласования шкал времени спутников и приемоиндикаторов должна быть высокой. Технически достижимая точность s*t=10-6с. дает погрешность дистанции s*D=c*s*t=300 м., что недопустимо. Требуемая точность согласования шкал времени s*t<=10-10c, что технически недостижимо, проблема решается введением в систему уравнения (8.1) еще одно неизвестное Dt для разрешимости системы в этом случае необходимо еще одно уравнения, т.е. еще один спутник. При этом система (8.1) имеет вид: Di=C*(ti+Dt) (8.2), i=1,2,3.. – плоскость (j,l,Dt) 2-D позиционирование i=1,2,3,4 – пространство (j,l,H,Dt) – 3-D позиционирование. Шкалы времени спутников согласованы между собой с точностью - Dt<=10-12c. – атомный стандарт. Dt<=10-14 c. – водородный стандарт, т.е. идеальный к требованиям точности, поэтому Dt принимается общей для всех спутников. Одна из важнейших характеристик СНС является доступность навигационной временной информации, .т.е. вероятность получения обсервации в любое время суток, года и в любой точке земного шара.
Расчетная цифра – 0,999997 должна быть достигнута в 2000 г. она означает что в год вы остаетесь без обсервации на 1 минуту. На 1998 г. цифра равна=0,997. В результате во многих районах обсервация недоступна. Сущность расчета географических координат по (8.2) заключается в следующем: дистанция Di выражается через неизвестные прямоугольные геоцентрические координаты потребителя – X,Y,Z и известные прямоугольные координаты спутника Xsi, Ysi, Zsi - которые сообщаются спутниками:
 (8.3) i=1,2,3,4…. Координаты
(8.3) i=1,2,3,4…. Координаты
потребителя в (8.3) выражаются через географические известные соотношения:
X=[N+H]cosjcosl
Y=[N+H]cosjsinl
Z=[N(1-e2)+H]sinj
,где N – радиус кривизны принятого референт – эллипсоида или геометрическая модель земли, а применительно к картографии – система координат.
e – эксцентриситет принятого эллипсоида
Н – высота наблюдателя.
3.Влияние штормовых условий на судно. Требования МАРПОЛ 73/78 к осадке танкеров при плавании в балласте в шторм.
Потеря скорости судна. Скорость судна на волнении всегда меньше, чем в тихую погоду, вследствие:
увеличения сопротивления движению судна как из-за непосредственного воздействия на корпус ветра и волн, так и их вторичного влияния через различные виды качки и рыскание судна на курсе;
снижения эффективности действия гребного винта;
ограничения используемой мощности двигателя вследствие разгона гребного винта;
намеренного снижения скорости при возникновении ударов корпуса о волны (слеминг, удары волн в развал носа), заливания палубы и надстроек, чрезмерных ускорений при качке и др.
Основная часть естественной потери скорости судна обусловлена средним дополнительным сопротивлением, которое вызвано ветром и волнами.
Рысканье судна. В отличие от бортовой, килевой и вертикальной качек рыскание судна относят к дополнительным видам качки.
При оценке влияния рыскания на эксплуатационную скорость судна можно выделить следующие основные факторы, действие которых может сказаться на его ходовых качествах:
увеличение сопротивления корпуса вследствие движения судна с переменным по времени углом дрейфа;
увеличение сопротивления из-за перекладок руля;
увеличение длины пути, проходимого судном;
изменение режима работы гребного винта;
повышенный расход топлива и др.
Слеминг. Слеминг (днищевой) возникает в процессе продольной качки при оголении носовой оконечности и последующем соударении с волной. Большие динамические нагрузки могут привести к серьезным повреждениям конструкций корпуса и оборудования. Вероятность опасных ударов тем больше, чем больше высота волн и скорость судна. Наблюдаются они на встречном волнении в широком диапазоне курсовых углов. Поэтому отклонение по курсу от чисто встречного движения не всегда является эффективным средством избежать опасности слеминга.
Заливание палубы и удары волн в развал носа судна. Эти явления вызывают повреждения бака, палубного оборудования, трубопроводов, конструкций люковых закрытий, палубного груза, трюмов и т. д.
Удары волн в развал носа (бортовой слеминг или випинг) сами по себё вызывают вибрацию, вмятины в верхней части наружной обшивки носа и в палубе полубака. Многочисленны случаи повреждения груза. Для избежания заливания палубы наиболее рационально снизить
скорость судна или уменьшить осадку носом.
Разгон гребного винта и двигателя. Переменные гидродинамические силы и моменты, действующие на винт при качке, могут привести к поломке лопастей, конструкций гребного валопровода, вызвать вибрацию вала и кормы. Разгон винтов более вероятен для судов, на которых винты имеют малое погружение, большие удельные упоры, большие отношения шага к диаметру и частоты вращения.
Требования к осадке танкеров. dср=2+0,02L, y=dк-dн – дифферент, dк³Двинта
Билет 25.
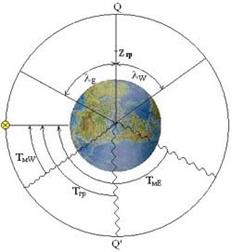 1.Время и его виды. Соотношения между временами на различных меридианах. Линия смены дат. Местное среднее время (Тм)- это это промежуток времени между моментом нижней кульминации среднего Солнца и текущим моментов времени для наблюдателя, находящегося на меридиане с долготой λ. Гринвичское время (Тгр) - это местное время гринвичского меридиана. Из рисунка видно, что на востоке местное время (Тм) всегда больше гринвичского времени (Тгр) на величину дуги долготы λ. Тгр = Тм ±λ WEТм = Тгр ± λEW Гринвичское время иногда называют всемирным. Оно является аргументом для входа в Морской астрономический ежегодник (МАЕ). Поясное время.Вся Земля разделена на 24 часовых пояса по 15° (или 1ч) долготы в каждом. Меридианы 0°, 15°, 30° и далее через 15° (до 180°) являются центральными для каждого пояса, меридианы с долготами 7°30', 22°30' и далее - это границы поясов. Они точно следуют по меридианам только в открытом море и океане. Поясным временем Тп называется местное время центрального меридиана данного часового пояса, принятое по всей территории пояса. Пояс с центральным меридианом Гринвича считается нулевым, а от него идет нумерация поясов к E или W, до двенадцатого пояса включительно. Для определения номера пояса, в котором находится судно или данный пункт, надо его долготу разделить на 15°. Частное от деления дает номер пояса, а если в остатке получится болше 7°30', то рассчитанный таким образом номер пояса увеличивается на единицу.Тп = Тгр ± ТEW Тгр = Тп ± ТWEМестное время в пределах одного часового пояса теоретически не должно отличаться от поясного Тп более чем на 30м, что соответствует ширине пояса в 7°30'. Однако, на суше границы часовых поясов не всегда совпадают с меридианами, кратными по долготе 7°30'. Они устанавливаются правительством стран и обычно совпадают с государственными, административными или географическими границами. Декретное, летнее, стандартное, судовое время. Декретное время Тд - это поясное время, увеличенное на 1ч. Россия живет по декретному времени. Тд = Тп + 1ч Летнее время - это время принятое в данном государстве на летний период. Летнее время - это поясное, увеличенное на 1ч. В России летнее время функционирует с последнего воскресенья марта по последнее воскресенье октября. Стандартное время - это время официально принятое в данном районе Земли. Это может быть поясное, летнее, декретное, поясное ± 30м Судовым временемТс называется поясное время того часового пояса, по которому поставлены судовые часы. Судовое время обычно отсчитывается с точностью до 1м.Линия смены дат. Особое положение занимает 12 пояс. Он состоит из двух половинок - 12 восточного и 12 западного пояса. Т.е. поясное время в 12-ом поясе одинаковое, но даты в 12-м восточном и 12-западном разные. Поэтому по 180° проходит линия смены дат(ЛСД). Официальная линия смены дат в некоторых районах Земли отклоняется от меридиана 180° так, чтобы территориальные образования относились к одной дате. При пересечении этой линии дату надо менять. Правила смены даты. Смену дат производят не в момент пересечения линии даты, а в полночь. При следовании судна восточными курсами (из Азии в Америку) дата в W-ом полушарии на момент пересечения ЛСД на сутки меньше. А в полночь наступает дата, которая уже была в Е-вом полушарии, т.е дату повторяем, например, после 2-го марта следует снова 2-ое марта. При следовании судна западными курсами (из Америки в Азию и Австралию) дата в Е-вом полушарии на момент пересечения ЛСД уже на сутки больше. Но т.к. дату меняем в полночь, то дату изменяем на двое суток вперед, например, с 2-го марта меняем на 4-ое марта, пропуская одни сутки.
1.Время и его виды. Соотношения между временами на различных меридианах. Линия смены дат. Местное среднее время (Тм)- это это промежуток времени между моментом нижней кульминации среднего Солнца и текущим моментов времени для наблюдателя, находящегося на меридиане с долготой λ. Гринвичское время (Тгр) - это местное время гринвичского меридиана. Из рисунка видно, что на востоке местное время (Тм) всегда больше гринвичского времени (Тгр) на величину дуги долготы λ. Тгр = Тм ±λ WEТм = Тгр ± λEW Гринвичское время иногда называют всемирным. Оно является аргументом для входа в Морской астрономический ежегодник (МАЕ). Поясное время.Вся Земля разделена на 24 часовых пояса по 15° (или 1ч) долготы в каждом. Меридианы 0°, 15°, 30° и далее через 15° (до 180°) являются центральными для каждого пояса, меридианы с долготами 7°30', 22°30' и далее - это границы поясов. Они точно следуют по меридианам только в открытом море и океане. Поясным временем Тп называется местное время центрального меридиана данного часового пояса, принятое по всей территории пояса. Пояс с центральным меридианом Гринвича считается нулевым, а от него идет нумерация поясов к E или W, до двенадцатого пояса включительно. Для определения номера пояса, в котором находится судно или данный пункт, надо его долготу разделить на 15°. Частное от деления дает номер пояса, а если в остатке получится болше 7°30', то рассчитанный таким образом номер пояса увеличивается на единицу.Тп = Тгр ± ТEW Тгр = Тп ± ТWEМестное время в пределах одного часового пояса теоретически не должно отличаться от поясного Тп более чем на 30м, что соответствует ширине пояса в 7°30'. Однако, на суше границы часовых поясов не всегда совпадают с меридианами, кратными по долготе 7°30'. Они устанавливаются правительством стран и обычно совпадают с государственными, административными или географическими границами. Декретное, летнее, стандартное, судовое время. Декретное время Тд - это поясное время, увеличенное на 1ч. Россия живет по декретному времени. Тд = Тп + 1ч Летнее время - это время принятое в данном государстве на летний период. Летнее время - это поясное, увеличенное на 1ч. В России летнее время функционирует с последнего воскресенья марта по последнее воскресенье октября. Стандартное время - это время официально принятое в данном районе Земли. Это может быть поясное, летнее, декретное, поясное ± 30м Судовым временемТс называется поясное время того часового пояса, по которому поставлены судовые часы. Судовое время обычно отсчитывается с точностью до 1м.Линия смены дат. Особое положение занимает 12 пояс. Он состоит из двух половинок - 12 восточного и 12 западного пояса. Т.е. поясное время в 12-ом поясе одинаковое, но даты в 12-м восточном и 12-западном разные. Поэтому по 180° проходит линия смены дат(ЛСД). Официальная линия смены дат в некоторых районах Земли отклоняется от меридиана 180° так, чтобы территориальные образования относились к одной дате. При пересечении этой линии дату надо менять. Правила смены даты. Смену дат производят не в момент пересечения линии даты, а в полночь. При следовании судна восточными курсами (из Азии в Америку) дата в W-ом полушарии на момент пересечения ЛСД на сутки меньше. А в полночь наступает дата, которая уже была в Е-вом полушарии, т.е дату повторяем, например, после 2-го марта следует снова 2-ое марта. При следовании судна западными курсами (из Америки в Азию и Австралию) дата в Е-вом полушарии на момент пересечения ЛСД уже на сутки больше. Но т.к. дату меняем в полночь, то дату изменяем на двое суток вперед, например, с 2-го марта меняем на 4-ое марта, пропуская одни сутки.
2.Блок схема импульсной РЛС. Виды ориентации изображения, режимы движения.
1 – синхронизатор, задающий временную диаграмму РЛС, вырабатывающий запускающий импульс и согласующий работу всех узлов РЛС (в современных РЛС реализуется программно с помощью компьютера)
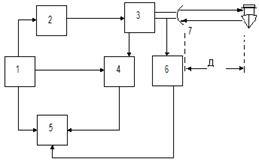 2 – передатчик вырабатывающий по запускающему импульсу от синхронизатора кратковременное СВЧ импульсное колебание, называемое зондирующим импульсом (ЗИ)
2 – передатчик вырабатывающий по запускающему импульсу от синхронизатора кратковременное СВЧ импульсное колебание, называемое зондирующим импульсом (ЗИ)
Частота СВЧ колебаний:
f= 9400*106 Гц l=3,2 см – основной диапазон
f=3000*106 Гц l=10 см – вспомогательный диапазон
t = (0,1 – 0,7)* 106 с – длительность импульса в зависимости от шкалы дальности)
3 – антенный переключатель, подключает антенну к выходу передатчика в момент излучения ЗИ и ко входу приемника в оставшееся время цикла работы РЛС.
4 - приемник, принимает отраженный от цели сигнал, преобразует его в видеосигнал
5 – индикатор, предназначен для отображения окружающей навигационной обстановки, включая сигналы цели, а также для измерения координат цели и параметров ее движения. (раньше только для САРП)
6 – датчик азимута антенны
7 – антенна
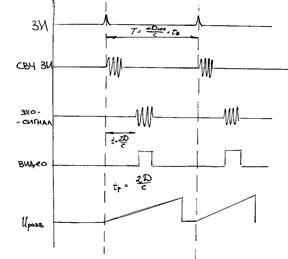 По запускающему импульсу ЗИ от синхронизатора передатчик формирует кратковременное СВЧ ЗИ, который через антенный переключатель излучается антенной. Отраженный от находящегося на расстоянии Д цели эхо – сигнал принимается антенной, преобразуясь в видеосигнал, который поступает на катод ЭЛТ индикатор. В индикаторе формируется пилообразное напряжение Uразб, которое поступает на отклоняющие пластины ЭЛТ и отклоняет луч от центра к периферии, образуя линию разверстки. Скорость разверстки пропорциональна скорости радиоволн в масштабе шкалы дальности. Угловое положение разверстки соответствует угловому положению антенн. Измеряемым параметров в РЛС является врем распространения сигнала до цели и обратно.
По запускающему импульсу ЗИ от синхронизатора передатчик формирует кратковременное СВЧ ЗИ, который через антенный переключатель излучается антенной. Отраженный от находящегося на расстоянии Д цели эхо – сигнал принимается антенной, преобразуясь в видеосигнал, который поступает на катод ЭЛТ индикатор. В индикаторе формируется пилообразное напряжение Uразб, которое поступает на отклоняющие пластины ЭЛТ и отклоняет луч от центра к периферии, образуя линию разверстки. Скорость разверстки пропорциональна скорости радиоволн в масштабе шкалы дальности. Угловое положение разверстки соответствует угловому положению антенн. Измеряемым параметров в РЛС является врем распространения сигнала до цели и обратно.
Типы движения: относительное, истинное.
Ориентации изображения: курс, север, курс стабилизированный.
3.Требования Резолюции ИМО к информации о маневренных характеристиках судна и ее содержанию. Стандарты маневренных качеств судов.
С 1987 г. Резолюцией ИМО была принята новая рекомендация, в соответствии с которой информация о маневренных характеристиках состоит из трех частей:
- лоцманская карточка;
- таблица маневренных характеристик (для ходовой рубки);
- формуляр маневренных характеристик.
Билет 26.
1.ОМС ускоренными способами. Способ «перемещенного» места.
ОМС по солнцу с предвычислением 2-й ВЛП. При ОМС по солнцу методом ВЛП измерения и вычисления разнесены во времени: первые измерения производятся за 1-1.5ч до кульминации, вторые-после. При хороших погодных условиях 2ю ВЛП можно предвычислить. Предвычисление 2й ВЛП производится заранее параллельно с расчетом 1й ВЛП. Эта параллельность вычислений существенно экономит время. Производя предвычисление, обсервованные координаты можно получить спустя 1-2 минуты после вторых измерений.
2.Точность автономного варианта GPS. Дифференциальные варианты.
2.1. Точность стандартного варианта системы
Автономный вариант.Только ПИ и никаких диф. поправок.
Источниками ошибок являются:
- условия распространения радиоволн;
- соотношение "сигнал/ шум";
- интерференция прямых и отраженных сигналов;
- рассогласование шкал времени спутников и ошибки зфемеридной информации.
Погрешность, вызываемая особенностями распространения радиоволн имеет две составляющие: ионосферную и тропосферную и обусловлена искривлением траектории за счет рефракции.
Ионосферная составляющая зависит от диэлектрических свойств среды и в наибольшей степени проявляется в районах тропиков при максимальной солнечной активности. Тропосферная рефракция зависит от температуры, давления и влажности воздуха. Реально погрешность определения координат составляет: порядка Зм - ионосферная составляющая и порядка 1м - тропосферная составляющая.
Погрешность за счёт интерференции мала и составляет величину порядка1м.
Шумовая составляющая может в десятки раз превышать полезный сигнал. Для защиты системы излучаемый спутником сигнал формируется как псевдослучайная последовательность.
Для уменьшения этих погрешностей наземные контрольно-измерительные пункты измеряют параметры орбит движения спутников и прогнозируют их данные, как и уход времени на каждый час вперёд. Таким образом, обеспечивается точность положения спутника порядка 1,5 м.
С учетом геометрического фактора система имеет следующие характеристики точности:
в определении координат - 9-200 м,
в определении скорости - 6-15 см/с.
В настоящее время реальным и практически реализуемым путем повышения точности являются дифференциальные варианты системы.
Дифференциальные варианты системы и их точность.
Наземными контрольными пунктами (КП) с известными координатами производятся измерения навигационных параметров по сигналам системы. Параметры с периодичностью 1 мин транслируются потребителям, находящимся в окрестностях КП. Потребители принимают параметры контрольного пункта и сигналы системы. Их совместная обработка позволяет исключить регулярные (коррелированные) погрешности и существенно повысить точность определения координат потребителя. К коррелированным погрешностям измерений, общим для КП и потребителя относятся:
- погрешности эфемерид:
- погрешность рассогласования шкал времени спутников;
- погрешности за условия распространения радиоволн;
- геодезические погрешности.
Общепринятый дифференциальный вариант основан на работе потребителя с одним КП.
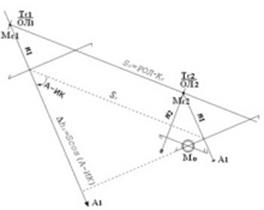
Развитый дифференциальный вариант позволяет сохранить высокую точность навигационных определений в радиусе до 1000 миль, практически не зависящую от удаления от КП. В таком варианте ряд (порядка 4-х) периферийных КП замыкаются на главный КП. образуя сеть. Геометрия сети такова, что главный КП
размещается в центре окружности, а периферийные КП- по радиусам. Главный КП принимает поправки от периферийных КП и после совместной обработки по довольно сложной модели объединяет их в формат дифференциального сообщения, которое действительно для района радиусом порядка 1000 миль, В дифференциальной сети рассчитываются погрешности эфемерид и рассогласование шкал времени спутников. Соответствующие поправки передаются спутникам. При этом эфемеридная погрешность снижается до 1 м, а погрешность за счет взаимной синхронизации спутников - до 0.3 м. Развитый дифференциальный вариант снижает также и атмосферные погрешности: ионосферную до 2 м, а тропосферную до 0,4 м.
|
из
5.00
|
Обсуждение в статье: Высотная линия положения, ее уравнение. Свойства высотных ЛП |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы