 |
Главная |


Синтез наблюдателя полного порядка
|
из
5.00
|
Наблюдателями называются динамические устройства, которые позволяют по известному входному и выходному сигналу системы управления получить оценку вектора состояния. Причем ошибка восстановления  .
.
Система задана в виде:

Начальные условия для заданной системы  .
.
Матрицы  заданы в пункте 5.1.1.
заданы в пункте 5.1.1.
Весовые матрицы  и
и  имеют следующий вид:
имеют следующий вид:
 ,
,  .
.
Построим наблюдатель полного порядка и получим значения наблюдаемых координат  таких, что:
таких, что: 

В качестве начальных условий для наблюдателя выберем нулевые н.у.:

Ранг матрицы наблюдаемости:
 - матрица
- матрица
наблюдаемости.
 .
.
 .
.
Т. е. система является наблюдаемой.
Коэффициенты регулятора:
 ,
,
тогда

Собственные значения матрицы  :
:

Коэффициенты наблюдателя выберем из условия того, чтобы наблюдатель был устойчивым, и ближайший к началу координат корень матрицы  лежал в 3 – 5 раз левее, чем наиболее быстрый корень матрицы . Выберем корни матрицы
лежал в 3 – 5 раз левее, чем наиболее быстрый корень матрицы . Выберем корни матрицы

Коэффициенты матрицы наблюдателя:
 .
.
Используя скрипт Sintez_nablyud_polnogo_poryadka, получили следующие результаты:

Рис.53. Графики решения уравнения Риккати.




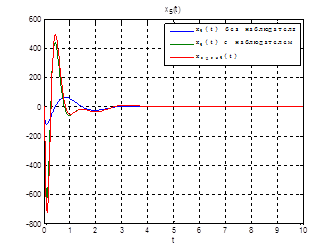
Рис.54. Графики фазовых координат.

Рис.55. Графики управлений.
Выводы: Так как система является полностью наблюдаема и полностью управляема, то спектр матрицы  может располагаться произвольно. Перемещая собственные значения матрицы
может располагаться произвольно. Перемещая собственные значения матрицы  левее, относительно собственных значений матрицы
левее, относительно собственных значений матрицы  мы улучшаем динамику системы, однако, наблюдатель становится более чувствителен к шумам.
мы улучшаем динамику системы, однако, наблюдатель становится более чувствителен к шумам.
Литература
1. Методы классической и современной теории автоматического управления: Учебник в 5 – и т. Т.4: Теория оптимизации систем автоматического управления / Под ред. Н.Д. Егупова. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2004. – 748 с.
2. Краснощёченко В.И.: Методическое пособие: «Методы теории оптимального управления».
Приложение.
PlotTimeFrHaract.m
clc
clear all
close all
b1 = 9;
b0 = 5;
a4 = 0.1153;
a3 = 1.78;
a2 = 3.92;
a1 = 14.42;
a0 = 8.583;
% syms s w
% W_s_chislit = b1 * s + b0;
% W_s_znamen = s * (a4 * s^4 + a3 * s^3 + a2 * s^2 + a1 * s + a0);
%
% W_s_obj = W_s_chislit/W_s_znamen;
%A_w = collect(simplify(abs(subs(W_s_obj, s, i*w))))
%----------------------Построение АЧХ-------------------------------------%
figure('Name', '[0,10]');
w = 0 : 0.01 : 10;
A_w = sqrt((b0^2 + b1^2.*w.^2)./((-a1*w.^2+a3*w.^4).^2+(a0*w-a2*w.^3+a4*w.^5).^2));
plot(w,A_w,'k', 'LineWidth', 2);
grid on
xlabel('w')
ylabel('A(w)')
title('Function ACHX(w)')
%-------------------------------------------------------------------------%
r_ch = roots([b1 b0])
r_zn = roots([a4 a3 a2 a1 a0 0])
%----------------------Построение ФЧХ-------------------------------------%
figure('Name', '[0,100]');
w = 0 : 0.01 : 100;
fi_w = (atan(w/0.5556)-atan(w/0)-atan(w/13.5832)-atan((w-2.7677)/0.5850)...
-atan((w+2.7677)/0.5850) - atan(w/(0.6848)))*180/pi;
plot(w,fi_w, 'k', 'LineWidth', 2);
grid on
xlabel('w')
ylabel('fi(w)')
title('Function FCHX(w)')
%-------------------------------------------------------------------------%
%----------------------Построение АФЧХ------------------------------------%
figure('Name', '[0,100]');
w = 0 : 0.01 : 100;
A_w = sqrt((b0^2 + b1^2.*w.^2)./((-a1*w.^2+a3*w.^4).^2+(a0*w-a2*w.^3+a4*w.^5).^2));
fi_w = (atan(w/0.5556)-atan(w/0)-atan(w/13.5832)-atan((w-2.7677)/0.5850)...
-atan((w+2.7677)/0.5850) - atan(w/(0.6848)));
polar(fi_w,A_w, 'k');
grid on
xlabel('Re(W(jw))')
ylabel('Im(W(jw))')
title('Function AFCHX(fi_w,A_w)')
%-------------------------------------------------------------------------%
%----------------------Построение ЛАЧХ------------------------------------%
figure('Name', '[0,100]');
w = -100 : 0.01 : 100;
LA_w = 20*log(sqrt((b0^2 + b1^2.*w.^2)./((-a1*w.^2+a3*w.^4).^2+(a0*w-a2*w.^3+a4*w.^5).^2)));
plot(w,LA_w,'k', 'LineWidth', 2);
grid on
xlabel('w')
ylabel('L(w)')
title('Function L(w)')
%-------------------------------------------------------------------------%
%----------------------Построение ФАЧХ------------------------------------%
%-------------------------------------------------------------------------%
%----------------------Построение h(t)------------------------------------%
figure('Name', '[0,50]');
t = 0 : 0.01 : 50;
h_t = 0.0024 * exp(-13.5832.*t) - 0.2175 * exp(-0.6848.*t)...
+ 0.1452 * exp(-0.5850.*t).* cos(2.7677.*t)...
- 0.2217 * exp(-0.5850.*t).* sin(2.7677.*t)...
+ 0.5825 .* t + 0.0699;
plot(t,h_t, 'k', 'LineWidth', 2);
grid on
xlabel('t')
ylabel('h(t)')
title('Function h(t)')
%-------------------------------------------------------------------------%
%----------------------Построение k(t)------------------------------------%
figure('Name', '[0,50]');
t = 0 : 0.01 : 50;
k_t = - 0.0329 * exp(-13.5832.*t) + 0.1489 * exp(-0.6848.*t)...
- 0.6986 * exp(-0.5850.*t).* cos(2.7677.*t)...
- 0.2721 * exp(-0.5850.*t).* sin(2.7677.*t)...
+ 0.5826;
plot(t,k_t, 'k', 'LineWidth', 2);
grid on
xlabel('t')
ylabel('k(t)')
title('Function k(t)')
%-------------------------------------------------------------------------%
x1=tf([b1 b0],[a4 a3 a2 a1 a0 0]);
ltiview(x1)
|
из
5.00
|
Обсуждение в статье: Синтез наблюдателя полного порядка |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы