 |
Главная |


Стабилизации объекта управления на конечном интервале времени
|
из
5.00
|
Рассмотрим линейный объект управления, описываемый системой дифференциальных уравнений в нормальной форме
Начальные условия для заданной системы 
Время стабилизации  .
.
Необходимо получить закон управления
минимизирующий функционал вида

Закон оптимального управления в данной задаче имеет вид

Матричное дифференциальное уравнение Риккати будет иметь следующий вид:

Если обозначить  то можно записать
то можно записать

Уравнение замкнутой скорректированной системы примет вид

Матрицы  заданы в пункте 5.1.1.
заданы в пункте 5.1.1.
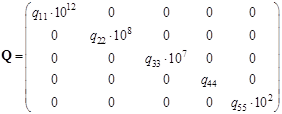
Весовые матрицы  и
и  имеют следующий вид:
имеют следующий вид:
 ,
,  .
.
Используя скрипт AKOR_stabilizaciya_na_konech_interval.m получили следующие результаты:
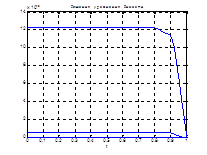
Рис.26. Графики решения уравнения Риккати.
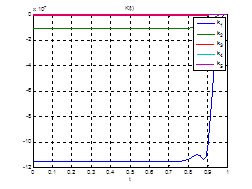
Рис.27. Графики коэффициентов регулятора обратной связи.
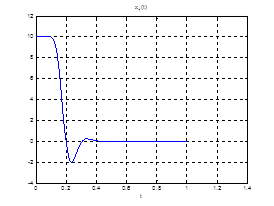
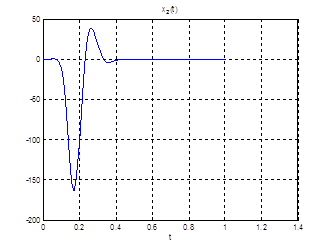
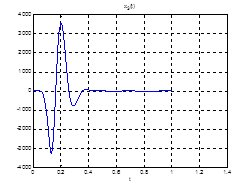
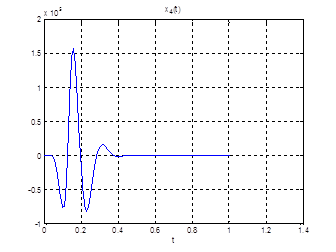
Рис.28. Графики фазовых координат.
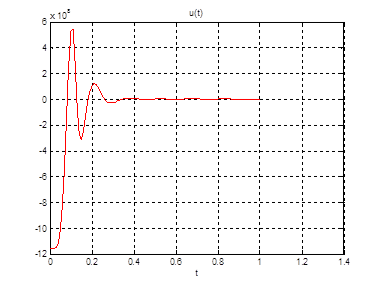
Рис.29. График управления.
Сравним, как стабилизируется система управления с постоянными и переменными коэффициентами регулятора обратной связи на начальном этапе:
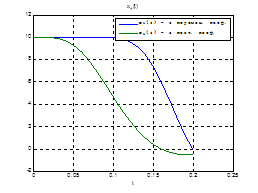
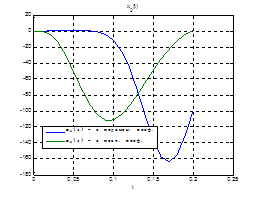
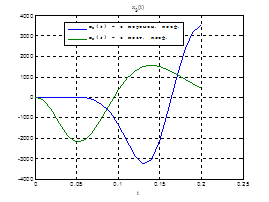
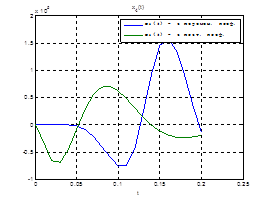
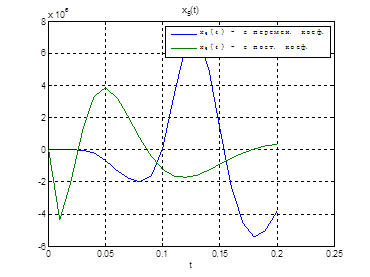
Рис.30. Графики фазовых координат.
Выводы: из графиков видно, что система, у которой коэффициенты регулятора меняются со временем, стабилизируется не хуже, чем, система, у которой коэффициенты регулятора не изменяются.
5.3 Задача АКОР – стабилизации для компенсации
известного возмущающего воздействия
Рассмотрим систему вида
 ,
,
где  – возмущающее воздействие.
– возмущающее воздействие.
Матрицы  заданы в пункте 5.1.1.
заданы в пункте 5.1.1.
Весовые матрицы  и
и  имеют следующий вид:
имеют следующий вид:
 ,
,  .
.
Начальные условия для заданной системы  .
.
Время стабилизации  .
.
Задаем возмущающее воздействие только на первую координату, так как только она имеет значение
 и
и  .
.
Решение задачи стабилизации сводится к решению уравнения Риккати

с начальными условиями: 
Введём вспомогательную вектор-функцию  , ДУ которой имеет вид:
, ДУ которой имеет вид:

с начальными условиями:  .
.
Управление определяется по формуле:
 .
.
Используя скрипт AKOR_stabilizaciya_pri_vozmusheniyah.m, получили следующие результаты:
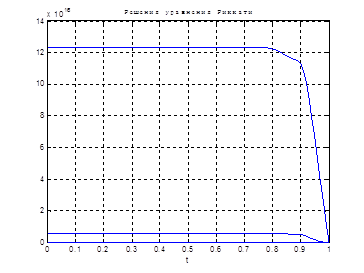
Рис.31. Графики решения уравнения Риккати.
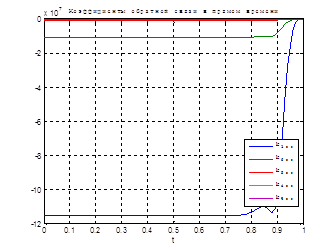
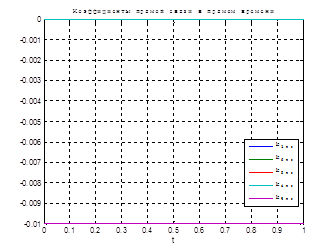
Рис.32. Графики коэффициентов регулятора обратной и прямой связи.
Рис.33. График возмущающего воздействия.
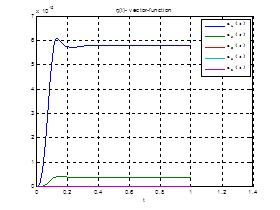
Рис.34. График вспомогательной вектор – функции.
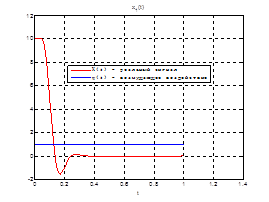
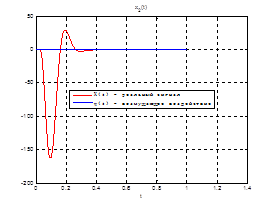
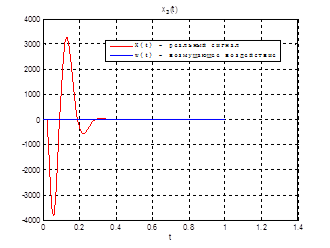
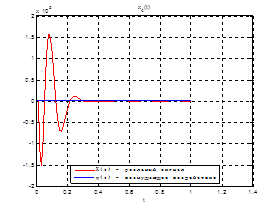
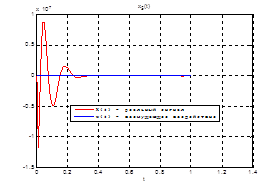
Рис.35. Графики фазовых координат.
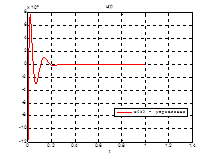
Рис.36. График управления.
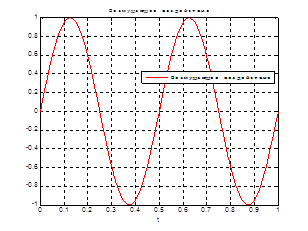
Рис.37. График возмущающего воздействия.
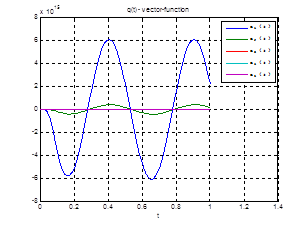
Рис.38. График вспомогательной вектор – функции.
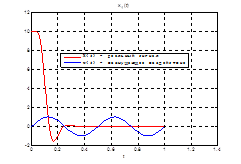
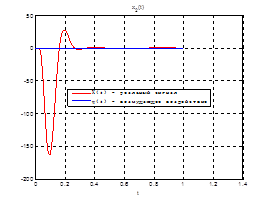
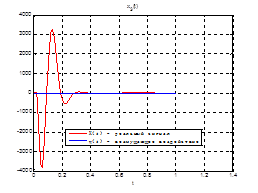
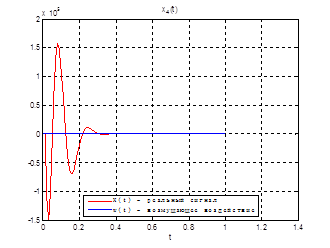
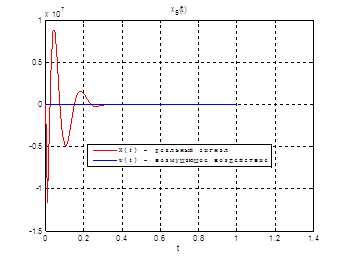
Рис.39. Графики фазовых координат.
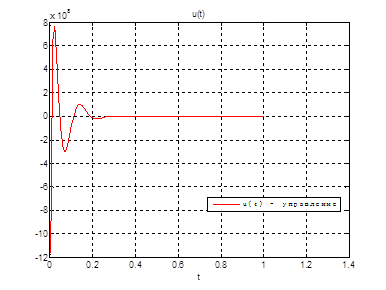
Рис.40. График управления.
Выводы: По графикам фазовых координат при различных воздействиях видно, что влияние возмущающего воздействия не существенно и фазовые координаты устанавливаются в ноль. При этом видно, что графики первой фазовой координаты при различных воздействиях мало отличаются друг от друга, т.е. система отрабатывает любое возмущение.
|
из
5.00
|
Обсуждение в статье: Стабилизации объекта управления на конечном интервале времени |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы