 |
Главная |


Моделирование систем с отказами
|
из
5.00
|
Первый шаг в методе диагностики, основанном моделях, состоит в выполнении математического описания рассматриваемой системы, которое так же описывает все возможные случаи отказов. Будем рассматривать линейные динамические системы со многими входами и выходами. В случае нелинейных систем, можно рассматривать линеаризованную в рабочей точке модель.
Как было отмечено ранее, мы будем рассматривать диагностику отказов для модели системы без обратной связи. В целях моделирования система без обратной связи может быть разделена на три части: исполнительные механизмы, динамика системы и датчики (рисунок 2.4).

Рис.2.4. Система без обратной связи
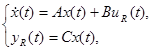
Динамика системы, представленной на рисунке 2.4 может быть описана моделью в переменных состояния:
 (2.1)
(2.1)
где  - вектор состояния системы,
- вектор состояния системы,  - вектор входного сигнала с исполнительного механизма,
- вектор входного сигнала с исполнительного механизма,  - фактический (не доступный) выходной вектор системы; А, В, С - известные матрицы системы соответствующих размерностей.
- фактический (не доступный) выходной вектор системы; А, В, С - известные матрицы системы соответствующих размерностей.

Рис. 2.5. Динамика системы
Когда происходит отказ компонента в системе (рисунок 2.5), динамическая модель системы может быть описана так:
 . (2.2)
. (2.2)
Отказ компонента представляет случай, когда изменение некоторых условий в системе приводит к невыполнению динамических отношений, например, утечка в баке в системе двух баков. В некоторых случаях, отказ может быть выражен как изменение параметров системы. Например, при изменении в i-ой строке и j-ом столбце матрицы А, динамика системы может быть описана так:
 , (2.3)
, (2.3)
где  - это j-ый элемент вектора
- это j-ый элемент вектора  и
и  - это n-мерный вектор с нулевыми элементами, кроме ‘1’ в i-том элементе.
- это n-мерный вектор с нулевыми элементами, кроме ‘1’ в i-том элементе.
Вообще говоря, реальный выход  системы непосредственно не доступен, для его измерения используются датчики. Этот случай отказа изображен на рисунке 2.6 и математически может быть описан следующим образом (при пренебрежении динамикой датчиков):
системы непосредственно не доступен, для его измерения используются датчики. Этот случай отказа изображен на рисунке 2.6 и математически может быть описан следующим образом (при пренебрежении динамикой датчиков):
 , (2.4)
, (2.4)
где  - вектор отказа датчика.
- вектор отказа датчика.
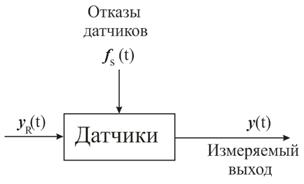
Рис. 2.6. Датчики, выход и измеряемый выход
Правильно выбрав вектор  , мы можем описать все случаи отказов датчиков. Когда выходной датчик показывает фиксированную величину (скажем ноль), вектор измерения y(t)=0 и вектор отказа = - yR(t). С другой стороны, когда датчики подвержены мультипликативному отказу, измерение становится
, мы можем описать все случаи отказов датчиков. Когда выходной датчик показывает фиксированную величину (скажем ноль), вектор измерения y(t)=0 и вектор отказа = - yR(t). С другой стороны, когда датчики подвержены мультипликативному отказу, измерение становится  , а вектор отказов может быть переписан так =
, а вектор отказов может быть переписан так =  .
.
Так же верно, что обычно действительный сигнал с исполнительного механизма  системы часто не доступен. это реакция исполнительного механизма на команду
системы часто не доступен. это реакция исполнительного механизма на команду  (при пренебрежении динамикой исполнительного механизма) (рисунок 2.6):
(при пренебрежении динамикой исполнительного механизма) (рисунок 2.6):
 , (2.5)
, (2.5)
где  - вектор отказа исполнительного механизма, а
- вектор отказа исполнительного механизма, а  - известная команда управления. Подобно случаю отказа датчика, могут быть рассмотрены так же различные ситуации для функции отказа
- известная команда управления. Подобно случаю отказа датчика, могут быть рассмотрены так же различные ситуации для функции отказа  .
.
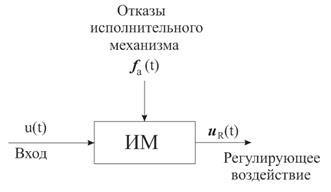
Рис. 2.7. Исполнительный механизм, вход и регулирующее воздействие
В случае, если вход системы неизвестен (т.е. в неконтролируемых системах), для измерения входа исполнительного механизма может быть использован входной датчик (рисунок 2.8). Датчик может быть представлен следующей моделью:
 , (2.6)
, (2.6)
 . (2.7)
. (2.7)
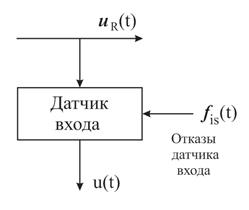
Рис. 2.8. Датчик входа
Когда в системе действуют всевозможные отказы датчиков, ее компонентов и исполнительных механизмов, ее модель может быть представлена следующим образом:
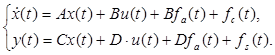 (2.8)
(2.8)
Рассматривая общий случай модель системы со всевозможными отказами может быть описана следующей моделью в переменных состояния:
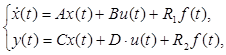 (2.9)
(2.9)
где  - вектор отказов, каждый элемент которого
- вектор отказов, каждый элемент которого  (i=1,2,…g) соответствует отдельному отказу. С практической точки зрения, неразумно делать дальнейшие предположения о характеристиках отказов, считая при этом их неизвестными функциями времени. Матрицы R1 и R2 известны как матрицы распределения отказов, представляющие воздействие отказов на систему. Вектор u(t) – это вход исполнительного механизма и или измеряемое управляющее воздействие (actuation), вектор y(t) – измеряемый выход. Оба вектора считаются известными при диагностике. В литературе по диагностике отказов векторы u(t) и y(t) просто называются входными и выходными векторами системы, за которой осуществляется мониторинг.
(i=1,2,…g) соответствует отдельному отказу. С практической точки зрения, неразумно делать дальнейшие предположения о характеристиках отказов, считая при этом их неизвестными функциями времени. Матрицы R1 и R2 известны как матрицы распределения отказов, представляющие воздействие отказов на систему. Вектор u(t) – это вход исполнительного механизма и или измеряемое управляющее воздействие (actuation), вектор y(t) – измеряемый выход. Оба вектора считаются известными при диагностике. В литературе по диагностике отказов векторы u(t) и y(t) просто называются входными и выходными векторами системы, за которой осуществляется мониторинг.
Представление системы со всеми возможными отказами в виде передаточной матрицы вход-выход имеет вид:
 , (2.10)
, (2.10)
где
 (2.11)
(2.11)
|
из
5.00
|
Обсуждение в статье: Моделирование систем с отказами |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы