 |
Главная |


ГЛАВА 4 ОПТИМИЗАЦИЯ ПАРАМЕТРОВ МОДЕЛИРУЕМОЙ СИСТЕМЫ
|
из
5.00
|
Для оптимизации параметров регулятора воспользуемся пакетом прикладных программ для построения систем управления Nonlinear Control Design (NCD) Blockset, который реализует метод динамической оптимизации. Этот инструмент, строго говоря, представляющий собой набор блоков, разработанных для использования с Simulink, автоматически настраивает параметры моделируемых систем, основываясь на определённых пользователем ограничениях на их временные характеристики. Сеанс в среде Simulink с использованием возможностей и блоков NCD Blockset состоит из ряда стадий:
· Создание модели системы из стандартных блоков в среде Simulink.
· Соединение входа блока NCD Outport с теми точками системы, на сигналы которых накладываются ограничения. Этими сигналами могут быть, например выходы системы, их среднеквадратические отклонения и т.д.
· Задание в режиме командной строки MATLAB начальных значений параметров, подлежащих оптимизации.
· Раскрытие блоков двойным щелчком мыши на пиктограмме NCD Outport 
· Изменение конфигураций и размеров областей ограничений для сигналов с помощью мыши.
· Задание интервалов дискретизации в меню блока NCD Outport (один или два процента от длительности процесса моделирования) и указание идентификаторов параметров системы, подлежащих оптимизации.
· Задание параметров системы и указание их номинальных значений.
· Сохранение сформированных ограничений в виде файла с помощью команды Save (позднее они могут быть загружены с помощью команды load).
· Процесс оптимизации системы инициализируется нажатием кнопки Start.
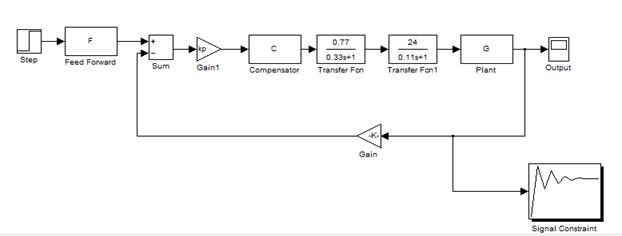 Преобразуем Simulink-модель системы, включив в нее дополнительно пропорциональное звено (П-регулятор) с коэффициентом пропорциональности kp (Рис. 4.1, Gain1). Для этого в окне Function Parameters редактора компоненты Gain1 выставим kp . (Рис. 4. 2). Подключим к выходу системы блок Signal Constraint из библиотеки Simulink,
Преобразуем Simulink-модель системы, включив в нее дополнительно пропорциональное звено (П-регулятор) с коэффициентом пропорциональности kp (Рис. 4.1, Gain1). Для этого в окне Function Parameters редактора компоненты Gain1 выставим kp . (Рис. 4. 2). Подключим к выходу системы блок Signal Constraint из библиотеки Simulink,
 Рис. 4 . 1. Преобразованная Simulink-модель системы управления
Рис. 4 . 1. Преобразованная Simulink-модель системы управления
Рис. 4. 2. Окно редактора пропорционального звена
содержащийся в разделе Simulink Response Optimization. В данной операции контролируемым сигналом является реакция системы на единичный скачек, т. е. ее переходная функция. Оптимизируемым параметром является коэффициент kp . На переходную функцию накладываются ограничения: максимальное перерегулирование – не более 5%; время нарастания – не более 3 с; длительность переходного процесса - не более 6 с.

Для выполнения процедуры оптимизации наберем в командной строке MATLAB начальное значение настраиваемого параметра kp = 2 и введем его. Далее двойным щелчком мыши откроем рабочее окно блока Signal Constraint (Рис. 4. 3).
Рис. 4 3. Рабочее окно блока Signal Constraint .
В графической части окна показаны границы контролируемого сигнала, установленные по умолчанию. Для изменения границ в соответствии с заданными значениями используется указатель мыши, позволяющий перемещать линии в вертикальном и горизонтальном направлении. Точную установку линий ограничения можно выполнить, выделяя требуемую линию двойным щелчком левой клавиши мыши. При этом откроется окно редактора Edit Constraint (Рис. 4. 4), где можно установить диапазон длины и уровня выделенной линии.

Рис . 4.4. Окно редактора Edit Constraint.
Следующий этап состоит в объявлении переменных, подлежащих оптимизации. Выбор команды меню Optimization ››Tuned Parameters приведет к открытию диалогового окна задания настраиваемых параметров Tuned Parameters (Рис. 4. 5). В котором, после нажатия кнопки Add , появится диалоговое окно Add Parameters , в нижнем поле

Рис. 4 . 5. Окна задания настраиваемых параметров Tuned Parameters
которого необходимо набрать имя коэффициента пропорциональности kp , подтвердив операцию нажатием кнопки ОК (Рис. 4. 6).

Рис. 4 . 6. Диалоговое окно Add Parameters
Появится график переходного процесса, подлежащего корректировке. Теперь необходимо запустить процесс оптимизации, нажав кнопку Start optimization. По окончании процесса оптимизации появится семейство графиков переходного процесса (Рис. 4. 7), в которых отражена динамика оптимизации при различных значениях коэффициента пропорциональности П – регулятора. Совокупность графиков содержит финальный график оптимального переходного процесса. График вписывается в установленные уровни.
Появится также окно выходной информации MATLAB (Рис. 4. 8), где содержится информация о процессе оптимизации и значение kp, соответствующее найденной оптимальной величине параметра П – регулятора. Характер оптимизированного переходного процесса можно также просмотреть на экране осциллографа (Рис. 4. 9).

Рис . 4. 7. Диалоговое окно Signal Constraint
max Directional First-order
Iter S-count f(x) constraint Step-size derivative optimality Procedure
0 1 0 2538
1 6 0 312.9 2.15 0 1 infeasible
2 9 0 1079 1.02 0 1 infeasible
3 12 0 202.2 0.831 0 1 infeasible
4 15 0 160.7 0.198 0 1 infeasible
5 18 0 203.8 0.199 0 1 Hessian modified; infeasible
6 21 0 168.6 0.203 0 1 Hessian modified twice; infeasible
7 24 0 202.8 0.202 0 1 Hessian modified; infeasible
8 27 0 163.5 0.2 0 1 Hessian modified twice; infeasible
9 30 0 203.5 0.2 0 1 Hessian modified; infeasible
10 33 0 166.7 0.202 0 1 Hessian modified twice; infeasible
11 36 0 203 0.201 0 1 Hessian modified; infeasible
12 39 0 164.6 0.2 0 1 Hessian modified twice; infeasible
13 42 0 203.3 0.201 0 1 Hessian modified; infeasible
14 45 0 166 0.201 0 1 Hessian modified twice; infeasible
15 48 0 203.1 0.201 0 1 Hessian modified; infeasible
16 51 0 165.1 0.201 0 1 Hessian modified twice; infeasible
17 54 0 203.2 0.201 0 1 Hessian modified; infeasible
 18 57 0 165.7 0.201 0 1 Hessian modified twice; infeasible
18 57 0 165.7 0.201 0 1 Hessian modified twice; infeasible
19 60 0 203.2 0.201 0 1 Hessian modified; infeasible
20 63 0 165.3 0.201 0 1 Hessian modified twice; infeasible
21 66 0 203.2 0.201 0 1 Hessian modified; infeasible
22 69 0 165.5 0.201 0 1 Hessian modified twice; infeasible
23 72 0 203.2 0.201 0 1 Hessian modified; infeasible
24 75 0 165.4 0.201 0 1 Hessian modified twice; infeasible
25 78 0 203.2 0.201 0 1 Hessian modified; infeasible
26 81 0 165.5 0.201 0 1 Hessian modified twice; infeasible
27 84 0 203.2 0.201 0 1 Hessian modified; infeasible
28 87 0 165.4 0.201 0 1 Hessian modified twice; infeasible
 29 90 0 203.2 0.201 0 1 Hessian modified; infeasible
29 90 0 203.2 0.201 0 1 Hessian modified; infeasible
30 93 0 165.5 0.201 0 1 Hessian modified twice; infeasible
31 96 0 203.2 0.201 0 1 Hessian modified; infeasible
32 99 0 165.4 0.201 0 1 Hessian modified twice; infeasible
33 102 0 203.2 0.201 0 1 Hessian modified; infeasible
34 105 0 165.5 0.201 0 1 Hessian modified twice; infeasible
35 108 0 203.2 0.201 0 1 Hessian modified; infeasible
36 111 0 165.5 0.201 0 1 Hessian modified twice; infeasible
37 114 0 203.2 0.201 0 1 Hessian modified; infeasible
38 117 0 165.5 0.201 0 1 Hessian modified twice; infeasible
39 120 0 203.2 0.201 0 1 Hessian modified; infeasible
40 123 0 165.5 0.201 0 1 Hessian modified twice; infeasible
41 126 0 203.2 0.201 0 1 Hessian modified; infeasible
42 129 0 165.5 0.201 0 1 Hessian modified twice; infeasible
43 132 0 203.2 0.201 0 1 Hessian modified; infeasible
44 135 0 165.5 0.201 0 1 Hessian modified twice; infeasible
45 138 0 203.2 0.201 0 1 Hessian modified; infeasible
46 141 0 165.5 0.201 0 1 Hessian modified twice; infeasible
47 144 0 203.2 0.201 0 1 Hessian modified; infeasible
48 147 0 165.5 0.201 0 1 Hessian modified twice; infeasible
49 150 0 203.2 0.201 0 1 Hessian modified; infeasible
50 153 0 165.5 0.201 0 1 Hessian modified twice; infeasible
51 156 0 203.2 0.201 0 1 Hessian modified; infeasible
52 159 0 165.5 0.201 0 1 Hessian modified twice; infeasible
53 162 0 203.2 0.201 0 1 Hessian modified; infeasible
54 165 0 165.5 0.201 0 1 Hessian modified twice; infeasible
55 168 0 203.2 0.201 0 1 Hessian modified; infeasible
56 171 0 165.5 0.201 0 1 Hessian modified twice; infeasible
57 174 0 203.2 0.201 0 1 Hessian modified; infeasible
58 177 0 165.5 0.201 0 1 Hessian modified twice; infeasible
59 180 0 203.2 0.201 0 1 Hessian modified; infeasible
60 183 0 165.5 0.201 0 1 Hessian modified twice; infeasible
61 186 0 203.2 0.201 0 1 Hessian modified; infeasible
62 189 0 165.5 0.201 0 1 Hessian modified twice; infeasible
63 192 0 203.2 0.201 0 1 Hessian modified; infeasible
64 195 0 165.5 0.201 0 1 Hessian modified twice; infeasible
65 198 0 203.2 0.201 0 1 Hessian modified; infeasible
66 201 0 165.5 0.201 0 1 Hessian modified twice; infeasible
67 204 0 203.2 0.201 0 1 Hessian modified; infeasible
68 207 0 165.5 0.201 0 1 Hessian modified twice; infeasible
69 210 0 203.2 0.201 0 1 Hessian modified; infeasible
70 213 0 165.5 0.201 0 1 Hessian modified twice; infeasible
71 216 0 203.2 0.201 0 1 Hessian modified; infeasible
72 219 0 165.5 0.201 0 1 Hessian modified twice; infeasible
73 222 0 203.2 0.201 0 1 Hessian modified; infeasible
74 225 0 165.5 0.201 0 1 Hessian modified twice; infeasible
75 228 0 203.2 0.201 0 1 Hessian modified; infeasible
76 231 0 165.5 0.201 0 1 Hessian modified twice; infeasible
77 234 0 203.2 0.201 0 1 Hessian modified; infeasible
78 237 0 165.5 0.201 0 1 Hessian modified twice; infeasible
79 240 0 203.2 0.201 0 1 Hessian modified; infeasible
80 243 0 165.5 0.201 0 1 Hessian modified twice; infeasible
81 246 0 203.2 0.201 0 1 Hessian modified; infeasible
82 249 0 165.5 0.201 0 1 Hessian modified twice; infeasible
83 252 0 203.2 0.201 0 1 Hessian modified; infeasible
84 255 0 165.5 0.201 0 1 Hessian modified twice; infeasible
85 258 0 203.2 0.201 0 1 Hessian modified; infeasible
86 261 0 165.5 0.201 0 1 Hessian modified twice; infeasible
87 264 0 203.2 0.201 0 1 Hessian modified; infeasible
88 267 0 165.5 0.201 0 1 Hessian modified twice; infeasible
89 270 0 203.2 0.201 0 1 Hessian modified; infeasible
90 273 0 165.5 0.201 0 1 Hessian modified twice; infeasible
91 276 0 203.2 0.201 0 1 Hessian modified; infeasible
92 279 0 165.5 0.201 0 1 Hessian modified twice; infeasible
93 282 0 203.2 0.201 0 1 Hessian modified; infeasible
94 285 0 165.5 0.201 0 1 Hessian modified twice; infeasible
95 288 0 203.2 0.201 0 1 Hessian modified; infeasible
96 291 0 165.5 0.201 0 1 Hessian modified twice; infeasible
97 294 0 203.2 0.201 0 1 Hessian modified; infeasible
98 297 0 165.5 0.201 0 1 Hessian modified twice; infeasible
99 300 0 203.2 0.201 0 1 Hessian modified; infeasible
100 303 0 165.5 0.201 0 1 Hessian modified twice; infeasible
Maximum number of iterations exceeded.
Restart or go to Optimization Options to increase the maximum of iterations.
kp =
0.0437
Рис. 4. 8. окно выходной информации

Рис. 4. 9 . Характер оптимизированного переходного процесса
Исходя из приоритета характеристик переходного процесса в нашем случае наилучший будет: kp = 0,0437.
ГЛАВА 5. АНАЛИЗ КАЧЕСТВА СИСТЕМЫ УПРАВЛЕНИЯ
Необходимо выполнить анализ построенной системы управления и дать оценку ее качества по основным показателям. Анализ снятой переходной характеристики системы после выполнения оптимизации показывает, что новые показатели качества переходного процесса:
Время регулирования составляет 6 с.
Установившееся значение – 0,18
Время нарастания – 3
Статическая ошибка – 0
Перерегулирование - 0 %
удовлетворяют заданным показателям.
Заключение
В данном курсовом проекте проведена идентификация объекта автоматического регулирования.
Проведена проверка на наблюдаемость и управляемость объекта управления.
На основе анализа переходных характеристик объекта управления был выбран наиболее подходящий для данного переходного процесса П – регулятор.
Проведена оптимизация настроечных параметров этого регулятора.
В результате введения в систему П - регулятора были получены следующие параметры системы:
ü Время переходного процесса 11 с.;
ü Время нарастания – 10 с.
ü Перерегулирование – 0%;
ü Статическая ошибка – нет;
ü Запас по фазе – 70 градусов;
Учитывая полученные значения и принятые допущения параметров системы можно утверждать, что выполнены все поставленные в задании на курсовую работу требовани  .
.
|
из
5.00
|
Обсуждение в статье: ГЛАВА 4 ОПТИМИЗАЦИЯ ПАРАМЕТРОВ МОДЕЛИРУЕМОЙ СИСТЕМЫ |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы