 |
Главная |


Основные результаты идентификации технического объекта автоматизации
|
из
5.00
|
Идентификация распылительной сушилки проводилась с целью получения модели объекта, необходимой для синтеза системы автоматизации и получения основных характеристик объекта автоматизации.
В результате проведенного эксперимента был получен массив данных, состоящий из 1097 значений входного параметра распылительной сушилки – расхода газа в м3/час и 1097 значений выходного параметра – температуры отходящих газов в градусах Цельсия, измеренных через временные промежутки 0, 08 с.
В ходе идентификации были получены следующие результаты:
1. Обработаны и преобразованы данные в единый файл, содержащий необходимую информацию о входных и выходных параметрах объекта, их значениях и размерностях измерения. Получены графические зависимости изменения температуры отходящих газов от расхода горючего газа на входе распылительной сушилки.
2. Проведено непараметрическое оценивание исходных данных для определения статистических характеристик массивов исходных данных.
3. В результате параметри  ческого оценивания экспериментальных данных, проведенного с целью определения параметров модели заданной структуры путем минимизации выбранного критерия качества модели, были получены различные структуры и виды моделей распылительной сушилки:
ческого оценивания экспериментальных данных, проведенного с целью определения параметров модели заданной структуры путем минимизации выбранного критерия качества модели, были получены различные структуры и виды моделей распылительной сушилки:
– модель авторегрессии;
– модель авторегрессии с дополнительным входом;
– модель авторегрессии скользящего среднего;
– модель «вход-выход»;
– модель Бокса-Дженкинса;
– модель для переменных состояния.
4. Проверка адекватности моделей показала, что наилучшей степенью адекватности (55.28%) обладает модель для BJ. Получены значения автокорреляционной функции ошибок процесса и значения взаимокорреляционой функции между остаточными ошибками и выходами объекта автоматизации вместе с соответствующими 99 %-ми доверительными коридорами.
5. Проведенное преобразование моделей позволило получить вид передаточных функций распылительной сушилки в дискретном и непрерывном видах, необходимых для дальнейшего анализа и синтеза системы автоматизации:
0.1327 z^2 + 0.1566 z + 0.0575
W(z) = ----------------------------------------------
z^3 - 0.3799 z^2 - 0.281 z + 0.07493
-0.891 s^2 + 77.33 s + 746.9
W(s) = ----------------------------------------
s^3 + 32.39 s^2 + 308.9 s + 891.7
Проведенный анализ модели распылительной сушилки позволил определить основные статические и динамические характеристики объекта автоматизации:
– время регулирования – 0,863 с;
– запас устойчивости по амплитуде – 29,7 дБ;
– запас устойчивости по фазе
– бесконечность.
7. Анализ управляемости и наблюдаемости объекта автоматизации показал, что распылительная сушилка является вполне управляемой и наблюдаемой. На неё можно подавать управляющие воздействия для перевода её из одного начального состояния в произвольное заранее заданное конечное состояние и для этого заранее заданного управляющего воздействия можно определить (измерить) начальное состояние вектора переменных состояния.
ГЛАВА 3. ПОСТРОЕНИЕ СИСТЕМЫ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ
ПРОЦЕССОМ
3.1.Задание структуры системы автоматического управления, проверка системы управления на устойчивость
Функция rltool открывает графический интерфейс, позволяющий проектировать корректирующее звено в замкнутой одномерной системе управления методом корневого годографа. Функция имеет следующий синтаксис:
rltool(sys,comp,LocationFlag,FeedbackSign)
где: sys – имя модели одномерного объекта;
comp – имя корректирующего звена (компенсатора);
LocationFlag – переменная, задающая позицию компенсатора в системе: 1 – в прямом тракте системы, 2 – в цепи обратной связи;
FeedbackSign – тип обратной связи: -1 – отрицательная обратная связь, 1 - положительная обратная связь.
Но удобнее работать с окном интерфейса SISO Design for System FeedbackConfig.
Выполнение функции rltool без аргументов приводит к появлению основного окна интерфейса SISO Design for System FeedbackConfig, реализующего метод корневого годографа (Рис. 3. 13). Кнопка +/- позволяет установить отрицательную (-) обратную связь. Кнопка FS позволяет выбрать структуру системы и позицию компенсатора в системе.
Выберем структуру с расположением компенсатора «С» в прямом тракте системы (Рис. 3. 13) и отрицательную обратную связь. Далее необходимо задать модели звеньев структурной схемы: «F», «C», «G», «H». Для этого следует сделать следующее:
В меню окна интерфейса SISO Design for System FeedbackConfig необходимо выполнить команды: File Import . В открывшемся окне (Рис. 3. 14) загрузки модели Import System Data выберем модель sysn4s. Переключатель Import from указывает, из какой области загружается модель. Модель sysn4s находится в рабочей области MATLAB, т. е. в Workspace. В поле System Data окна Import System Data (Рис. 3. 14) обозначена структурная схема замкнутой системы. В ней «F», «G», «H» звенья модели которые можно загружать. Звено, обозначенное буквой «С», это то компенсирующее динамическое звено структуру и параметры которого нужно определить.
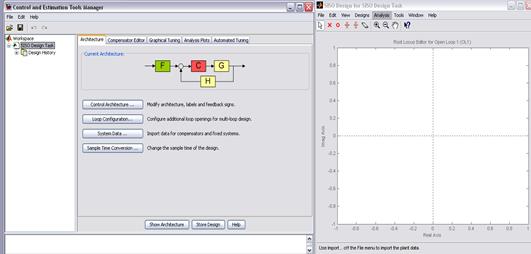
Рис . 3. 13. Окна интерфейса SISO Design for System FeedbackConfig
. 
Рис. 3 . 14. Окно загрузки модели Import System Data
Далее необходимо выполнить загрузку модели технического объекта управления sysn4s в звено «G» нажатием кнопки со стрелкой, указывающей на звено «G». Модели звеньев «F» и «H» выберем по умолчанию (это пропорциональные звенья с единичным коэффициентом передачи). Сохраним, полученную модель под именем mysys1. Подтвердим сохранение нажатием кнопки ОК. Окно загрузки при этом закроется, а основное окно интерфейса приобретет вид, показанный на рис. 3. 15.

Рис . 6. 15. Основное окно интерфейса SISO Design for System mysys1
В графической части окна на комплексной плоскости нулей и полюсов отображены полюсы и нули замкнутой системы, а также линии их перемещения при изменении коэффициента передачи компенсатора от заданного значения до бесконечности. Система имеет три полюса и два нуля (это подтверждается видом аналитического выражения передаточной функции ТОУ, которую можно просмотреть, если щелкнуть ЛК на блоке «G» структурной схемы замкнутой системы и в открывшемся окне System Data в поле Plant Model : sy sn4s нажать кнопку Show Transfer Function). Передаточная функция имеет в числителе полином второй степени, а в знаменателе полином третьей степени.
Из расположения полюсов (крестики) на комплексной плоскости следует, что замкнутая система достаточно устойчива, так как все три полюса находятся в левой полуплоскости и достаточно далеко от границы устойчивости. В этом еще можно убедиться, просмотрев график переходного процесса замкнутой системы, если в меню Analysis выполнить команду Response to Step Command. Данный выбор приведет к открытию окна интерактивного обозревателя LTI - Viewer for SISO Design Tool (Рис. 3. 16). Как видно из графика сходящегося переходного процесса (кривая r to y) время переходного процесса достаточно мало (с данным корректирующим звеном пропорционального типа с коэффициентом пропорциональности равным единице). Система устойчива.
Однако следует отметить, что при явной устойчивости системы наблюдается некоторое перерегулирование переходного процесса. Следовательно, можно попытаться скорректировать переходный процесс, сделав его апериодическим, т. е улучшить динамические свойства системы. Сделать это можно путем подбора передаточной функции компенсирующего звена «С».

Рис. 3. 16. Графики переходных процессов в системе
расположенных над графическим окном.
В поле Current Compensator окна SISO Design for System mysys4 отразится текущая передаточная функция компенсатора. Необходимо также помнить, что после выполнения меню Analysis в произведенной сессии дальнейшие изменения в структуре системы не будут отражены в результатах повторного выполнения меню Analysis. Поэтому для дальнейшего анализы при коррекции системы необходимо загружать новое окно интерфейса, выполнив повторно в режиме командной строки функцию rltool .
Далее необходимо выполнить анализ построенной замкнутой системы управления с целью определения ее параметров и, сравнив их с заданными в техническом задании параметрами, сделать вывод о необходимости корректировки системы или убедиться в отсутствии такой необходимости. Просмотреть все характеристики можно выполнив в меню Analysis окна SISO Design for System mysys4 команды: Response to Step Command; Rejection of Step Disturbance; Closed-Loop Bode; Compensator Bode; Open-Loop Nyquist. После выполнения команд появится окно обозревателя LTIViewer (Рис. 3. 17)

Рис. 3 . 17 . О кно обозревателя LTIViewer
При выполнении в меню Tools команды Draw Simulink Diagram (изобразить диаграмму Simulink) можно перейти к моделированию функциональной схемы в среде Simulink (Рис. 3. 18).

Рис. 3. 21. Переход в среду Simulink
Таким образом, в пункте 3. 1. 3 мы освоили алгоритм построения структурной схемы замкнутой системы управления. Оценили устойчивость системы. Полученные навыки используем для формирования и оптимизации системы управления ТОУ (выбранного варианта объекта управления). Рассмотрим процесс построения и оптимизации системы управления сушилки клинкера (модель сушилки уже получена – это модель sysn4s).
|
из
5.00
|
Обсуждение в статье: Основные результаты идентификации технического объекта автоматизации |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы