 |
Главная |


Построение структуры системы автоматического регулирования
|
из
5.00
|
установки обжига клинкера 
Необходимым условием надежной устойчивой работы автоматизированной системы регулирования является правильный выбор типа регулятора и его настроек, гарантирующий требуемое качество регулирования. В зависимости от свойств объектов управления, определяемых его передаточной функцией и параметрами, и предполагаемого вида переходного процесса выбирается тип и настройка линейных регуляторов.
Согласно исходных данных переходный процесс должен быть апериодическим с малым временем регулирования и малым перерегулированием.
На основании заданных значений передаточных функций датчика, усилительно-преобразовательного устройства, исполнительного механизма (справочные данные) и построенной модели объекта регулирования sysn4s выполним в SIMULINK построение замкнутой системы автоматического регулирования обжига клинкера.
Предварительный вариант системы автоматического регулирования уже получен. Система оптимизирована по характеру переходного процесса и представлена в среде Simulink (Рис. 6. 22). Необходимо скорректировать полученную Simulink-модель системы, включив в нее недостающие элементы: модель датчика, модель усилительно-преобразовательного устройства и модель исполнительного механизма.
Структурно - функциональная блок-схема системы автоматического регулирования представлена на рис. 3. 22.
 |  |  | |  | |||||||
 | |||||||||||




 р
р

3 22. Структурно - функциональная блок-схема системы автоматического регулирования
ЗС – задающий сигнал; Р – регулятор; УПУ – усилительно - преобразовательное устройство; ИМ – исполнительный механизм; ОУ – объект управления; ДОС – датчик обратной связи.
В соответствии со структурно-функциональной блок-схемой (Рис. 3. 20) системы автоматического регулирования выполним коррекцию топологии Simulink-модели системы (Рис. 3 21, дополнив ее блоками, имеющими передаточные функции в соответствие со справочными данными: Wдос = 0.4, Wупу =15(0.22 + 1); Wим = 0.19(0.37 + 1) и включим в качестве задающего сигнала единичный скачек (блок Step, Рис. 3 23.)
Выполним команду Start simulation в окне модели asd 99*. В окне Output осциллографа будем наблюдать переходный процесс (Рис. 3. 25). Регистрация параметров переходной характеристики показывает, что имеющиеся показатели качества не удовлетворяют заданным: Большое время переходного процесса, появилось перерегулирование
Заданные показатели качества и запасы устойчивости:
Время регулирования ≤0.2 с
Статическая ошибка ≤0,05
Перерегулирование ≤1 %
Время нарастания ≤0.1 с
Устойчивость по амплитуде ≥10 дБ
Устойчивость по фазе от 30 до 80 градусов.
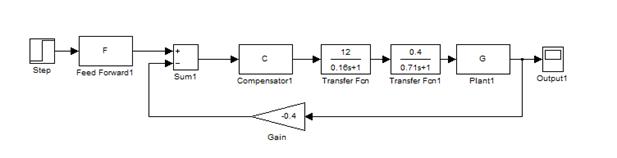
3. 23. Simulink - модель системы
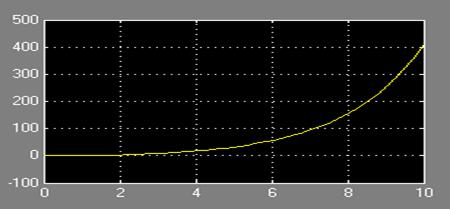
Рис. 3. 24 . График переходного процесса
Исходя из выше изложенных рекомендаций и учитывая, что вид переходной характеристики должен соответствовать апериодическому процессу, выполним процедуру оптимизации построенной системы управления. Для оптимизации параметров регулятора воспользуемся пакетом прикладных программ для построения систем управления Nonlinear Control Design (NCD) Blockset, реализующий метод динамической оптимизации.
|
из
5.00
|
Обсуждение в статье: Построение структуры системы автоматического регулирования |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы