 |
Главная |


Пространственная фильтрация в когерентных оптических системах
|
из
5.00
|
В последние годы пространственная фильтрация широко и эффективно применяется в оптических системах, работающих с когерентным излучением, — в когерентных оптических системах. В этих системах используется замечательное свойство некоторых когерентных систем — возможность сравнительно простыми средствами осуществить преобразование Фурье оптического сигнала (изображения), т.е. перейти к его представлению в виде спектра пространственных частот.
Одной из наиболее простых и известных схем для получения пространственно-частотного спектра изображения, представленного в виде некоторого транспаранта с переменной прозрачностью, является схема, показанная на рис. 11.13. Если транспарант Т, освещаемый монохроматическим когерентным излучением — плоской волной, поместить в передней фокальной плоскости Р1 объектива О, то в задней фокальной плоскости Р2 этого объектива распределение амплитуд колебания с точностью до постоянного множителя будет соответствовать преобразованию Фурье функции, описывающей амплитуду поля на выходе транспаранта [21].
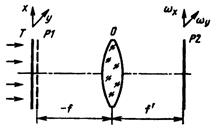
Рис.11.13. Схема реализации преобразования Фурье при плоском фронте волны
Особенностями такой схемы преобразования Фурье являются:
1. 1. инвариантность протяженности спектра (Фурье-образа) к поперечному смещению и поворотам транспаранта;
2. 2. удаление от оси системы отдельных гармоник (световых пятен в плоскости Р2) по мере роста их порядка;
3. 3. 3) поворот спектра в плоскости Р2 при повороте транспаранта вокруг оптической оси в плоскости Р1.
Преобразование Фурье в когерентной оптической системе можно осуществить при освещении транспаранта с записью преобразуемого сигнала не только плоской волной, но и сферической.
Известно [21], что если транспарант с записью сигнала f1(x) поместить в плоскость Р1 между линзой Л (объективом) и плоскостью Р2 изображения точечного источника s0, создающего сферическую волну (рис. 11.14, а), то в этой плоскости также образуется спектр функции f1(x), т.е. F(wx). При изменении расстояния d 0 изменяется масштаб пространственных частот в плоскости Р2. Транспарант желательно располагать ближе к объективу.
Возможна также схема с использованием сферической волны, когда транспарант с записью сигнала f1(x) располагается перед линзой (рис. 11.14, б). И в этом случае в плоскости Р2 изображения точечного источника s0, получают спектр сигнала. Масштаб спектра пространственных частот в плоскости Р2 можно изменять, перемещая плоскость Р1 сигнала так, чтобы R1+ R0 оставалось постоянным.
Рассмотренные схемы отличаются от схемы, в которой используется плоская волна (см. рис. 11. 13), тем, что для них в выражение выходного сигнала в плоскости Р2, помимо спектра f1(x), входит дополнительный фазовый множитель. Для схемы, показанной на рис. 11.14, б, при расположении Р1 в передней фокальной плоскости линзы Л, т.е. при Ro=f¢л , дополнительный фазовый множитель равен нулю, а масштаб пространственных частот в плоскости Р2 определяется как wx=2pх/lf¢ л.
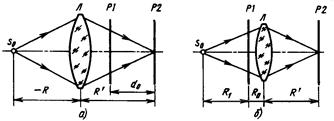
Рис.11.14. Схема реализации преобразования Фурье при сферическом фронте волны: а — транспарант за линзой; б — транспарант перед линзой
При R0=0 и R1=R¢=2f¢ л масштаб изображения источника равен 1:1, а масштаб частот wx=px/lf¢ л. То же самое имеет место для схемы, представленной на рис. 11.14, а, при R¢=d0.
В большинстве практических систем когерентных Фурье-преобразователей спектр пространственных частот фиксируется приемниками (глазом, фотопленкой, фотоприемником и т.д.), реагирующими на среднюю интенсивность излучения, которая пропорциональна интегралу от квадрата амплитуды F(wx). Поэтому, если за время наблюдения или регистрации сигнал f1(x) по амплитуде не меняется, то в плоскости Р2 регистрируется величина, зависящая только от квадрата модуля, но не от фазы функции F(wx). В этом случае плоскость входного сигнала Р1 можно располагать на произвольном расстоянии от линзы, но при этом меняется масштаб спектра.
Если сравнить рис. 11.13 и 11.14, то можно заключить, что при использовании сферической волны проще менять масштаб по осям пространственных частот. Однако при этом расстояния d0 и R1 могут быть значительными, что увеличивает продольные размеры системы.
Составляя систему из ячеек, подобных, например, представленной на рис. 11.13, можно осуществлять последовательно ряд преобразований Фурье. Поскольку линзы при переходе от плоскостей Р1 к плоскостям Р2 дают лишь одностороннее преобразование Фурье, т.е. знак при экспоненте при этом остается постоянным, то для осуществления последовательных прямого и обратного преобразований нужно в плоскостях P1, Р2, …, Рn, Рn+1) последовательно менять направление координатных осей х и y, учитывая оборачивающее действие оптической системы.
Пространственную фильтрацию в когерентной системе можно осуществлять по схеме, показанной на рис. 11.15. Дополняя описанную выше схему (см. рис. 11.14, а) линзой Л2 и располагая в плоскости Р2 транспарант (пространственный фильтр), прозрачность которого по амплитуде определяется функцией А(wx , wу), получим на входе Л2 волну, амплитуда которой равна произведению спектра S(wx , wу) сигнала, записанного на транспаранте Р1 и А(wx , wу). Линза Л2 (объектив) осуществляет в плоскости Р3 обратное преобразование Фурье этого произведения, т.е. восстанавливает отфильтрованный сигнал.
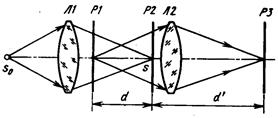
Рис.11.15. Одна из возможных схем пространственной фильтрации в когерентной оптической системе
Для обеспечения линейности и инвариантности процесса преобразования сигнала, а также для компенсации фазового сдвига входной зрачок линзы Л2, служащей для восстановления отфильтрованного сигнала, должен быть расположен в плоскости Р2.
Если фильтром пространственных частот служит входной зрачок линзы Л2, радиус которого равен R, то верхней граничной пространственной частотой (частотой среза фильтра) является w=R/ld. Более высокие пространственные частоты такой фильтр не пропустит.
Отсюда возникают и соответствующие требования к качеству объективов, осуществляющих преобразование Фурье и фильтрацию сигналов. Их угловое разрешение dq должно быть не менее l/R. Так, при радиусе зрачка R=60 мм и l=0,63·10-3 мм требуемое угловое разрешение Фурье-объектива составляет ~10-5 рад.
Часто пространственная фильтрация в когерентной системе осуществляется путем установки пространственного фильтра А(wx , wу)в задней фокальной плоскости Фурье-объектива, в передней фокальной плоскости которого находится транспарант с распределением прозрачности, соответствующим смеси сигнала и помех. Применяя пространственный фильтр в виде непрозрачной диафрагмы с прорезями, положение и форма которых соответствуют фильтруемым пространственным гармоникам полезного сигнала, можно с высокой степенью эффективности подавить составляющие от помех, например устранить постоянную и другие низкочастотные составляющие спектра.
Изложенный принцип используется и для построения многоканальных фильтров, осуществляющих фильтрацию только по одной координате, но одновременно по многим каналам. Для этого сферические линзы Л1 и Л2 (см. рис. 11.15) заменяют цилиндрическими [21] . Одномерные сигналы или смеси сигналов и помех записываются в виде одномерных функций, и эти записи размещаются друг над другом в плоскости Р1. В каждом из каналов плоскости Р2 можно установить свой фильтр-маску.
Принципиально конструкция пространственных фильтров в таких системах проще, чем в некогерентных системах. Фильтры представляют собой растры с прозрачными и непрозрачными участками. При достаточном разнесении пространственных гармоник в частотной (задней фокальной) плоскости проще отсечь «ненужные» гармоники при создании согласованного фильтра, чем обеспечить при некогерентной пространственной фильтрации заданный в соответствии с видом сигнала закон распределения прозрачности фильтра. Одним из наиболее сложных вопросов реализации пространственной фильтрации в когерентных системах является создание высококачественных транспарантов — устройств для записи обрабатываемых сигналов, а также транспарантов - пространственных фильтров, обладающих достаточно высоким разрешением и работающих в реальном масштабе времени. В качестве таких транспарантов часто служат голограммы, а также пространственно-временные модуляторы (см. § 9.7).
Сравнительно недавно было предложено использовать пространственную фильтрацию в когерентных оптических системах для обработки многоцветных изображений, например для согласованной спектральной фильтрации (фильтрации по длинам волн излучения). Одна из возможных схем устройств такого рода представлена на рис. 11.16.
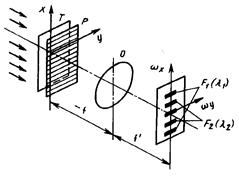
Рис.11.16. Схема спектральной (по длинам волн l) фильтрации в когерентной оптической системе
Многоцветное когерентное излучение подсвечивает транспарант Т с цветовым изображением и амплитудным пропусканием f(x, у). Непосредственно за транспарантом расположена дифракционная решетка Р, штрихи которой ориентированы вдоль оси у, а амплитудное пропускание описывается функцией t(x, y)=1+cosw0 x, где w0 — пространственная частота решетки в угловой мере.
Для каких-либо двух длин волн l1 и l2 амплитуду поля за решеткой можно представить как

В задней фокальной плоскости Фурье-объектива О распределение амплитуд, т. е. пространственно-частотный спектр, с точностью до постоянного множителя описывается функцией вида
где Fi(·) — преобразование Фурье функции fi(·); wx и wу — координаты в задней фокальной плоскости объектива.
Отсюда следует, что спектры Fi, разнесены вдоль оси wx на ±w0f¢l/2p. Подбирая w0 и устанавливая согласованные фильтры-диафрагмы в задней фокальной плоскости, можно выделить спектры Fi с требуемой длиной волны li, а применяя затем еще одно преобразование Фурье — восстановить изображение fi(x, у, li) в каком-либо одном цвете или получить его автокорреляционную функцию для заданной длины волны li.
11.6. Обнаружение движущихся объектов с помощью пространственно-временной фильтрации
Простейшим способом обнаружения движущихся объектов является сравнение последовательно наблюдаемых кадров, т.е. изображений просматриваемого поля. Осуществляя выборку во времени значений поля яркостей или освещенностей и вычитая значения сигналов, получаемых в каждом предыдущем кадре (выборке), из значений сигналов в «текущем» кадре, можно компенсировать (минимизировать) сигналы (яркости, освещенности), не изменяющиеся во времени, и, напротив, выделить изменяющиеся от кадра к кадру сигналы (изображения).
Большими преимуществами по сравнению с таким простым временным дифференцированием изображений обладает обработка изображения с помощью оператора Лапласа (лапласиана). Для получения лапласиана сигнала, снимаемого с элемента поля с координатами (х,у),образуется выражение вида

где n -1, п, n +1 — три последовательных момента времени, в которые сигнал принимает значения un-1, un, un+1; они соответствуют трем последовательным кадрам обрабатываемого изображения.
Алгоритм выделения движущегося объекта включает следующие операции:
1. 1. определение абсолютных значений лапласианов Ln;
2. 2. бинаризацию получаемых значений (пороговое ограничение) путем придания значения «1» тем элементам анализируемого поля, для которых лапласиан превышает некоторое пороговое значение, и значения «0» остальным элементам;
3. 3. определение положения энергетического центра тяжести бинаризованного изображения;
4. 4. повторение описанных операций для следующих временных выборок анализируемого поля (следующих кадров).
При этом возможно определение скорости движения изображения путем деления значения смещения его центра тяжести на интервал времени, в течение которого происходило это смещение.
Более сложной является обработка изображений, содержащих не один, а несколько движущихся объектов.
Здесь могут быть использованы следующие методы:
1. 1. оптической корреляции;
2. 2. основанные на априорном знании скорости движения объектов;
3. 3. выделения контуров объекта, а не центра тяжести и ряд других.
Часто, особенно при «зашумленных» изображениях, когда наряду с выделяемыми объектами в анализируемом поле присутствуют многочисленные помехи в виде пестрого, т.е. случайно меняющего свою яркость в пространстве и времени фона, достаточно эффективными являются алгоритмы пространственно-временной обработки изображений, описываемые ниже.
На качество выделения движущихся объектов оказывают большое влияние случайные изменения яркости фона, на котором наблюдается объект, если скорость этих изменений сопоставима со скоростью движения объекта или межкадровый интервал времени достаточно велик. Другим вредным фактором может быть вибрация основания, на котором установлен прибор, предназначенный для обнаружения движущегося объекта.
В последнее время помимо сравнительно простых и хорошо освоенных способов временной обработки оптических сигналов для решения указанной задачи все шире применяется комбинированный способ — пространственно-временная фильтрация, при которой используются трехмерные фильтры в соответствии с представлением оптического сигнала в виде функции двух пространственных координат — х и у (обычно в плоскости изображения) и времени t.
Пространственная обработка ведется путем пространственной дискретизации (деления поля изображений на отдельные элементы), выборки значений сигналов, имеющих место для каждого элемента, и превращения этих сигналов (потоков, освещенностей) в электрические сигналы. Все эти операции успешно реализуются с помощью многоэлементных анализаторов, например мозаичных приемников (см. гл.7). Полученные значения электрических сигналов подвергаются временной обработке.
Процесс селекции движущегося объекта можно разбить на две стадии:
1. 1. обработка изображения поля (поля изображений) в целях выделения полезного сигнала - изображения объекта и подавления (уменьшения) посторонних изображений;
2. 2. слежение за объектом для идентификации его.
Рассмотрим сначала алгоритмы решения первой стадии общей задачи.
Алгоритм временного дифференцирования (АВД). Это — известный и кратко описанный выше алгоритм, применяемый в радиолокации и в ОЭП [13, 37]. При относительном взаимном перемещении поля объектов и элемента анализатора изображений сигнал, снимаемый с этого элемента, изменяется во времени. Дифференцируя полученный временной сигнал путем его выборки в отдельные моменты времени и выделения соответствующих разностей, для элемента с центром в точке (х, у) в момент времени п можно получить сигнал
где N определяется порядком дифференцирования; рi — вес сигнала, поступающего на вход элемента в i-й момент времени; un-i(х, у) — выборка сигнала с элемента (х, у) во времени.
Значения весов при различных порядках дифференцирования выбирают такими же, как и в рассмотренном выше (см. §11.5) случае пространственной фильтрации: при дифференцировании 1-го порядка: +1, -1; 2-го порядка: -1/2, +1, -1/2; 3-го порядка: -1/3, +1, -1, +1/3; 4-го порядка: +1/6, -2/3, +1, -2/3, +1/6. Например, дифференцирующий фильтр 2-го порядка даст выходной сигнал Un(x,у) для элемента (х, у) вида

Легко видеть, что, как и при пространственной фильтрации, при постоянном входном сигнале выходной сигнал Un(x,у) будет равен нулю.
Алгоритм пространственного дифференцирования (АПД). Принцип действия простейшего фильтра, реализующего АПД, может быть пояснен с помощью рис. 11.11. Пусть некоторое поле изображений, состоящее из М´N элементов, просматривается совокупностью K´L элементов (K и L — нечетные числа), на рис. 11.11 — «окном» из 3´3 элементов. В момент времени tn на центральный элемент «окна» поступает сигнал un(х, у), т.е. координаты центра этого элемента — (х,у). На рис. 11.11 для момента времени tn принято обозначение иn(х,y)=u xy=u22. В логической схеме, показанной на рис. 11.11, б, этот сигнал вычитается в сумматорах S из сигналов, снимаемых с каждого из элементов K´L «окна» во время предыдущего кадра (в предыдущей выборке значений поля изображений элементами K´L «окна»). На выход проходит только сигнал, образующий наименьшую разность. Это позволяет исключить из дальнейшей обработки такие детали (объекты) в поле изображений, которые остаются постоянными во времени (не меняют своего положения).
Представленный на рис. 11.11 фильтр осуществляет дифференцирование 1-го порядка. Выходной сигнал для него определяется как
 (11.28)
(11.28)
где

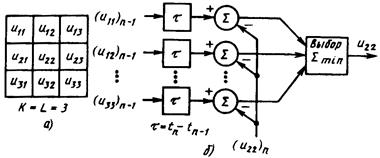
Рис.11.11. Пространственно-временное дифференцирование изображений: а — анализирующее многоэлементное окно; б — схема устройства для обработки сигнала
В общем случае, т.е. при произвольном порядке дифференцирования, вместо (11.28) можно записать

где k и l определяются так же, как и для (11.28); r — целое число, причем оно может быть и больше и меньше п, если обрабатываются и последующие за tn кадры (поля изображений) и предшествующие этому моменту. Если осуществляется двустороннее дифференцирование первого порядка, то значения r соответственно равны +1 и -1.
Если пространственный фильтр из K´L элементов, осуществляющий дифференцирование 1-го порядка, просматривает поле из М´N элементов, то в память логического устройства или ЭВМ заводится K´L´М´ N значений. При увеличении K и L, что позволяет улучшить качество фильтрации, например снизить влияние вибраций основания, на котором располагается ОЭП, требования к емкости памяти могут заметно возрасти. То же происходит и при увеличении просматриваемого поля, т.е. М´N, и при повышении порядка дифференцирования.
Пиковое детектирование. При этом алгоритме каждый элемент поля в последовательных временных выборках (в последовательных кадрах) рассматривается как центр окна из K´L элементов. Сигнал, снимаемый с элемента (х, у), сравнивается с сигналами со смежных элементов, образующих K´L окно с центром в (х, у). Если сигнал в любом из смежных элементов больше, чем в центральном, то выходной сигнал Un(x, у) с центрального элемента принимается равным нулю. В противном случае он принимает значение, равное входному сигналу иn(х, у).
Пороговое ограничение. Здесь амплитуда входного сигнала в каждой точке поля (каждом элементе) сравнивается с некоторым заранее устанавливаемым порогом. Если этот сигнал меньше порога, то выходной сигнал Un(x, y) принимается равным нулю, а если он больше порога или равен ему, то Un(x, y)=un(х, у).
Согласованная фильтрация. Применение согласованных фильтров (см. §11.2) эффективно для выделения сигналов, наблюдаемых на фоне помех. При обработке дискретизированных изображений с помощью двумерных мозаичных анализаторов используются цифровые согласованные фильтры, коэффициенты «пропускания» которых можно описать двумерной дискретной функцией h(k, l). Обычно эти коэффициенты представляют в двоичном коде, т. е. они являются степенями основания 2, что удобно для цифровой обработки информации. Пропущенные через такие фильтры сигналы определяются как

где все обозначения те же, что и в (11.28).
В работе [37] приведены результаты сравнения различных алгоритмов, проведенного при моделировании процесса подавления наземного фона, наблюдаемого из космоса, и при наличии в угловом поле ОЭП двух слоев движущихся облаков. Критерием для сравнения служила степень подавления среднего квадратического значения шумового сигнала, создаваемого фоном, а также значение отношения сигнал/шум, определяемое для некоторого гипотетического движущегося объекта. Наибольшую эффективность имело двустороннее пространственное дифференцирование, в большинстве случаев применяемое одновременно с пороговым ограничением и пиковым детектированием. Однако и при использовании простого пространственного дифференцирования выделение движущегося объекта на фоне гораздо более эффективно, чем при использовании временного дифференцирования.
На второй стадии решения задачи по селекции движущегося объекта иногда можно использовать априорную информацию о скорости его движения. Для этого нужно найти скорость движения объекта, обнаруженного на фоне помех с помощью одного из описанных выше алгоритмов, и сравнить ее с заранее известным значением. Первым этапом такого решения может быть определение траектории движении объекта (выделение трека изображения), вторым — слежение за этим движением, а затем и сопоставление получаемой информации с априорной в целях принятия решения о наличии движущегося объекта в анализируемом поле.
Траекторию можно найти следующим путем. Если сигнал un(х,у )в точке с координатами (х, у) в n-й момент времени (в n-м кадре) не равен нулю, а при следующей временной выборке, т.е. в (n+1)-м кадре, отличный от нуля сигнал un+1 наблюдается в точке (x+k, у+l), то отрезок, соединяющий эти две точки, с определенной вероятностью принимается за отрезок траектории движения объекта, создающего сигналы un и un+1. Если в следующем (n+2)-м кадре в области, прилегающей к точке с координатами (x+ 2k, y+2l), т.е. в анализирующем «окне» из K´L элементов (см. рис. 11.11, а), сигнал не равен нулю, то прямую или ломаную, соединяющую элементы поля, в которых в n-, (n+1)- и (n+2)-м кадрах имелись сигналы, можно принять за траекторию движения объекта, выделенного на фоне помех или пестрого фона. Во время следующих выборок (кадров) можно заранее предсказывать положение анализирующего «окна» из K´L элементов, определяя скорость движения как отношение путей, пройденных изображением от точки (х, у) к точке (x+k, у+l) и от последней точки к точке (x+2k, у+2l), к соответствующим промежуткам времени между n-м и (n+1)-м и (n+1)-м и (n+2)-м кадрами.
Дальнейшее развитие этого метода предусматривает использование адаптивных фильтров, минимизирующих погрешности определения текущего значения скорости. При получении ненулевых сигналов с нескольких элементов, образующих окно K´L, можно селектировать сигнал по его амплитуде, а также по степени приближения элемента к центральному элементу окна.
Окончательное распознавание движущегося объекта ведется с использованием ряда признаков: степени приближения полученного значения скорости к априорно известной, числа проанализированных кадров, числа потерь объекта при слежении за ним и др.
Результаты моделирования всего процесса обнаружения и селекции одного или нескольких (Ј10) движущихся объектов на фоне помех с помощью многоэлементных анализаторов, приведенные в [37], показали, что вероятность ложных тревог (см. §11.2) при использовании описанных выше алгоритмов и методов может быть сделана очень малой (порядка 10-4…10-6 при числе кадров n=10 и 10-12…10-15 при n=20).
Медианная фильтрация
Медианная фильтрация служит для устранения импульсных шумов путем нелинейного сглаживания смеси «сигнал+шум» с сохранением краевых переходов сигнала и его локальных однородных областей. Она применяется для подавления неаддитивного негауссовского шума, который не коррелируется с сигналом.
При медианной фильтрации значению сигнала в какой-либо точке поля сигналов приписывается среднее из значений в небольшом окне, окружающем данную точку, т.е. среднее из значений сигнала в этой точке и соседних с ней. Например, если размер окна N=3 (просмотр поля идет трехэлементным окном) и значения выборок сигнала в последовательных трех точках (трех элементах окна) равны и, Зu и 8u, то на выходе медианного фильтра сигналу в средней точке приписывается значение 4u.
Прежде чем сигнал проходит через медианный фильтр (МФ) он складывается с r выборками нулевых значений в начале и конце просмотра поля. Это делается для минимизации краевых эффектов. Значение r определяется в соответствии с размером N окна как
r= (N-1)/2.
Наибольшее распространение получили бинарные медианные фильтры (БМФ), для которых входные и выходные сигналы представляются в виде бинарных последовательностей. Например, для сигнала, принимающего М значений или квантуемого на М уровней, ряд из М-1 двоичных сигналов может быть получен путем квантования входных значений на уровни k=1, 2, …, М-1. Квантованный выходной сигнал равен 1, если входной сигнал больше или равен k, и 0 во всех остальных случаях. Полученный двоичный ряд после квантования проходит через ряд БМФ, выходные сигналы с которых складываются и образуют отфильтрованный (сглаженный) сигнал.
Действие МФ эквивалентно сложению двоичных выборок в рассматриваемом окне, сравнению полученной суммы с r и замене суммы на 1, если сумма больше r, или на 0 во всех остальных случаях.
Описанные операции могут быть реализованы с помощью оптико-электронных средств. Наиболее проста реализация МФ на базе многоэлементных приемников излучения, «разбивающих» поле изображений сигналов и шумов на отдельные элементы — пиксели.
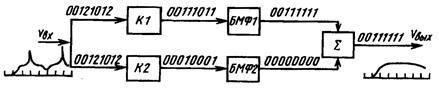
Рис.11.12. Схема медианного фильтра с двумя квантователями
На рис. 11.12 представлена схема медианного фильтра с двумя квантователями K1 и K2 (k1=l и k2=2 соответственно), на входы которых поступает сигнал nвх, например, сигнал, соответствующий последовательности отсчетов 00121012, снимаемых с отдельных элементов многоплощадочного приемника излучения — пикселей изображения. На выходе сумматора S снимается отфильтрованный сигнал nвых, в котором отсутствуют шумовые выбросы (пики), имевшие место на четвертом и восьмом пикселях входного сигнала.
В некоторых оптико-электронных системах технического зрения используется разновидность медианного фильтра — осредняющий уравновешенный фильтр «двойное окно». Он может рассматриваться как некое среднее между двумя «крайностями» — усредняющим и медианным фильтрами. Для выделения краев изображения (оконтуривания) он по качеству и скорости обработки сигнала является одним из лучших.
Фильтр использует как малое, так и большое окна, центрированные на текущем пикселе. Пусть f(x, у) — уровень серого на пикселе с координатами (х, у), т. е. f(x, у) — сглаженное, усредненное значение «веса» пикселя. Обработка сигнала рассматриваемым фильтром образует следующий алгоритм:
1. 1. определение медианного значения т(х, у) в малом окне (2N1+1, 2N1+1) пикселей с центром на (х, у);
2. 2. установка ряда интенсивности [m(x, y)-q, m(x, y)+ q], где q -выбираемый (настроечный) параметр;
3. 3. вычисление среднего из сигналов всех пикселей, лежащих внутри этого ряда интенсивности в пределах большого окна (2N2+1, 2N2+1) пикселей с центром на (х, у), включая пиксели меньшего окна; это значение передается на выходной (центральный) пиксель.
Логика работы фильтра чрезвычайно проста: медианный оператор используется для нахождения среднего уровня (серого) сигналов соседних пикселей, а затем отсчеты с пикселей с одинаковым уровнем серого (как у центрального пикселя) осредняются, чтобы дать относительно сглаженный выход. Внутреннее окно сохраняется малым для того, чтобы сохранить достоверные контуры и края, т.е. ослабить смаз изображения в результате действия медианного сглаживания. Так как медианный фильтр используется на первом этапе обработки сигнала, такой фильтр эффективно сохраняет края (перепады) и одновременно подавляет импульсы.
При выборе параметра q («ранговый» параметр) следует учитывать среднее квадратическое значение шума s. Фильтр приближается либо к медианному, при q®0, либо к усредняющему, при q®¥.
Если предположить, что шум гауссов, то выбор q от 2s до 3s эквивалентен подключению от 95,5% до 99,7% пикселей из совокупности, центрированной на медиане.
|
из
5.00
|
Обсуждение в статье: Пространственная фильтрация в когерентных оптических системах |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы