 |
Главная |


Динамические системы наблюдаемые на фоне
|
из
5.00
|
шумов
Одномерные динамические системы и фильтр Калмана
(1)  ;
; 
Шумы  - называются шумами наблюдения (для активных по-
- называются шумами наблюдения (для активных по-
мех). Задачу фильтрации будем решать методом наименьших
квадратов. Задача фильрации требует уменьшить  .
.
Вводим эмпирический риск :
(2) 
- Это есть классическая запись метода наименьших квадра-
тов . Эмпирический риск назван так потому, что в риск
 входят наблюдения. Согласно формуле (2) требуется
входят наблюдения. Согласно формуле (2) требуется
минимизировать риск, а следовательно уменьшить влияние
шумов.
Если бы не была придумана модель уравнения (1), тогда
невозможно было бы записать риск  . Необходимо
. Необходимо
так выбрать  , чтобы получить минимум по всей траектории.
, чтобы получить минимум по всей траектории.
Эти  будем обозначать :
будем обозначать :  - оптимальная траектория
- оптимальная траектория
Она получается путем дифференцирования  , i=1,2...n
, i=1,2...n
Проделав математические операции получаем одномерный
фильтр Калмана.
(3)  ;
;  - задано
- задано
n=1,2...
Комментарий к формуле (3) :
Фильтр Калмана сглаживает шумы и оказывается, если шу-
мы  гауссовские, то этот фильтр является оптимальным.
гауссовские, то этот фильтр является оптимальным.
(4) 
n ® ¥ 
Т.е. среднеквадратическая ошибка будет минимизирована.
Если шумы  не являются гауссовскими, то такая оценка
не являются гауссовскими, то такая оценка
является ассимптотически минимальной, т.е. (4) выпол-
няется когда n ® ¥ .
Формула (4) является критерием минимума среднеквадрати-
ческой ошибки.
Фильтр Калмана дает оценку процесса  истинного процесса
истинного процесса
 для гауссовских шумов, оптимальную по критерию (4),
для гауссовских шумов, оптимальную по критерию (4),
т.е. по критерию минимума среднеквадратической ошибки.
Замечание 1 : Оптимальность означает, что не существует
другого фильтра, который мог бы дать такие
же результаты по среднеквадратической ошибке.(Остальные
фильтры дают большую ошибку)
Замечание 2 : Фильтр Калмана, в отличие от согласованного
фильтра, выделяет форму сигнала наилучшим
образом. (Согласованный фильтр обнаруживает сигнал и дает
максимум отношения сигнал/шум на выходе и сильно искажает
сигнал) Для согласованного фильтра все равно какая форма
сигнала на выходе, а фильтр Калмана выдает тот же сигнал,
что и на входе. Т.е. согласованный фильтр - для обнаруже-
ния сигнала, а фильтр Калмана - для фильтрации от шумов.
Замечание 3 : Фильтр Калмана записывается во временной
области, а не в частотной, как фильтр Вин-
нера.
Фильтр Виннера - реализован в частотной области.
(5) 
K(w) - оптимальная функция передачи, которая мини-
мизирует среднеквадратическую ошибку.


 y(t)
y(t)  - Оценка оптимальна. Она минимизирует СКО.
- Оценка оптимальна. Она минимизирует СКО.
 - энергетический спектр (распределение энергии
- энергетический спектр (распределение энергии
случайного процесса).
 - энергетический спектр помехи.
- энергетический спектр помехи.


 Фильтр Калмана и Виннера дают
Фильтр Калмана и Виннера дают
 -
-  одинаковое качество фильтрации,
одинаковое качество фильтрации,
однако фильтр Калмана проще ре-
ализуется на ЭВМ. Поэтому его и
 АЧХ (пунктир) используют.
АЧХ (пунктир) используют.
 | |||||||
 |  | ||||||
 | |||||||



 -
- 



 режекция
режекция
 помехи
помехи
Анализ фильтра Калмана
 |
 Фильтр
Фильтр 
 Калмана
Калмана
 |
 ;
; 
x(t)- ненаблюдаемый случайный процесс
y(t)- наблюдаемый случайный процесс

 y(t) На входе фильтр Калма-
y(t) На входе фильтр Калма-
на использует наблюде-
ния и начальные усло-


 вия. На выходе фильтра
вия. На выходе фильтра



 x(t) получается исходный
x(t) получается исходный
процесс x(t).




 |
Фильтрация медленных процессов
 x(t)
x(t)
При а=0.999,









 ,
,


 есть медленный процесс, тогда
есть медленный процесс, тогда



 , это следует из формулы
, это следует из формулы
(3).В этом случае  -
-
 t - экстраполяция (прогноз),т.е.
t - экстраполяция (прогноз),т.е.
прошлая и текущая оценки поч-
ти одинаковы. В таком фильтре Калмана почти полностью иг-
норируются наблюдения. При оценке ситуации фильтр Калмана
не доверяет наблюдениям, а доверяет лишь прошлой оценке.
Это годится для процессов, которые можно легко предска-
зать.
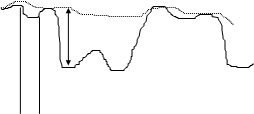
Фильтрация быстрых процессов
 - большая величина (>1);
- большая величина (>1);  .
.
 x(t)
x(t)
 динамическая ошибка
динамическая ошибка
 | |||
 |






 t
t
Тогда  , в этом случае
, в этом случае  (оценка) равна самим наблю-
(оценка) равна самим наблю-
дениям. Это значит, что фильтр Калмана не доверяет прош-
лым оценкам.
Вывод : Фильтр Калмана минимизирует и флуктуационную и
динамическую ошибку.
Динамической ошибкой называется разница между оценкой  и
и
истинным значением процесса.
- =динамическая ошибка.
Флуктуационная ошибка - тоже, но за счет шума.
При быстром процессе шумы фактически не фильтруются.
Невязка  входит в фильтр Калмана и выполняет роль
входит в фильтр Калмана и выполняет роль
корректирующего члена, который в формуле (3)
учитывает ситуацию, которую дают наблюдения.
Оценка на шаге ‘n’ равна экстраполированной оценке
плюс некоторый корректирующий член, который есть невязка,
которая взята с весом  . (Корректирующий член учитывает
. (Корректирующий член учитывает
наблюдения на шаге ‘n’) Вес учитывает апприорную дина-
мику системы (модели).
Вывод (по одномерному фильтру Калмана):
1) Фильтр Калмана можно построить в виде реккурентного
алгоритма только в том случае, если имеется модель
случайного процесса, который он фильтрует.
2) Фильтр Калмана оптимален для реального процесса только
в том случае, если реальный процесс близок к модели,
которую мы используем.
Многомерный фильтр Калмана
(1)  , где
, где  - текущее время, -
- текущее время, - 
- вектор (столбики)
A - матрица k´k, H - матрица m´k.
 - вектор,
- вектор,  - шум наблюдения
- шум наблюдения
 ;
;  - шум динамической системы.
- шум динамической системы.
Запишем (1) в скалярной форме. covx=Q, covh=P.


Многомерный фильтр Калмана для модели (1) :
 ,
,
где  - вес,
- вес,  - невязка.
- невязка.
 ; где
; где  - единичная матрица
- единичная матрица
 =
=  Г
Г  ; Начальные условия задаются из аппри-
; Начальные условия задаются из аппри-
Г  ; орных условий
; орных условий  .
.  - транспони-
- транспони-
рованная матрица (сопряженная).
Траекторные изменения
Часто требуется получить оценку траектории летательного
аппарата. Летательный аппарат может быть зафиксирован с
помощью радиолокатора, либо некоторой навигационной сис-
темой.
Летательный аппарат рассматривается в некоторой сис-
теме координат :
 Если известны точно все 9 коор-
Если известны точно все 9 коор-
Z динат (см.ниже), то можно точ-



 л.а. но навести ракету. Для определе-
л.а. но навести ракету. Для определе-
ния всех координат существуют
 р X траекторные фильтры, которые
р X траекторные фильтры, которые
строятся на базе фильтра Калмана.
Y

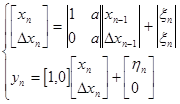
Траекторный фильтр 2-го порядка
(1)  ; a<1
; a<1
Первые две строки (1) - это модель, последняя строка -
- наблюдение.
Составим многомерный фильтр Калмана , для этого по мо-
дели (1) составим многомерную модель.
 ;
; 
(2)  ;
; 
 ;
;  ; H=[1,0]
; H=[1,0]
Из формулы (2) имеем :
 ;
;  ;
;
 ;
;  ;
; 
Траекторный фильтр 3-го порядка
(4)  , первые две строки - модель,
, первые две строки - модель,
последняя строка - наблюдения
 ;
;  ;
;  ;
;  ;
;
H = [1,0,0] ;
 ;
;  ;
;

Теория нелинейной фильтрации
Здесь нелинейные модели записываются в виде :
(1) 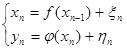 ; здесь : верхняя функция - нелиней-
; здесь : верхняя функция - нелиней-
ная регрессия, нижняя - уравнение наблюдений.
Функция  генерирует на любом интервале неко-
генерирует на любом интервале неко-
торый случайный процесс  . Это есть модель неко-
. Это есть модель неко-
торого случайного процесса, более богатая, чем все преды-
дущие модели.
Уравнение наблюдений : наблюдается не сама  , а не-
, а не-
которая функция j(  );наблюдения ведутся на фоне шумов
);наблюдения ведутся на фоне шумов 
 - шум нелинейной динамической системы (шум модели)
- шум нелинейной динамической системы (шум модели)
1) Требуется найти оценку  , такую, чтобы :
, такую, чтобы :
(2) 

Формула (2) - критерий минимума среднеквадратической
ошибки.
2) Требуется получить реккурентную оценку, такую же как в
фильтре Калмана.
В чистом виде получить оптимальную оценку нельзя, есть
лишь приближенные решения, когда функции f(x) и j(x) -
- линеаризуются.

Тейлоровская линеаризация - используется ряд Тейлора,
линейная часть (1-я, 2-го
члена). ( j(x) и f(x) - имеют непрерывные первые про-
изводные).
Разложение в ряд Тейлора в точке 

где - оценка, которую мы еще не знаем, но собираем-
ся находить.
Эти линеаризованные функции подставим в (1) и получим
линейную систему :
(2) 
Коэффициенты a,b,c,d находятся после подстановки.
 и
и  имеют произвольное распределение.
имеют произвольное распределение.
Будем использовать метод наименьших квадратов для на-
хождения оценок .
 ;
;  ;
; 
Выпишем эмпирический риск :



r - функционал.
После линеаризации :

производная из r берется легко
Продифференцировав и воспользовавшись методом индукции
получаем :
(3) 
 ;
;  - задано
- задано 
Выводы :
1. В связи с тем, что начальная точка разложения
в ряд Тейлора функции j(x) была выбрана в точ-
ке  , то несмотря на линеаризацию, урав-
, то несмотря на линеаризацию, урав-
нение (3) получилось как нелинейное и оно по-
хоже на уравнение (1) модели.
2. В отличие от фильтра Калмана, в  , при рек-
, при рек-
курентном его вычислении входит  - оценка
- оценка
‘x’ на первом шаге. Коэффициент усиления можно
вычислить заранее за ‘n’ шагов (в фильтре Кал-
мана). Но здесь этого сделать нельзя. Сущест-
вует так называемая обратная связь.
Пример нелинейной фильтрации :
 ;
; 
T - период колебания
t - период дискретизации
t - текущее время
 - фаза гармонического колебания с амплитудой равной 1
- фаза гармонического колебания с амплитудой равной 1
 процесс наблюдается на фоне шума
процесс наблюдается на фоне шума
 - дискретная частота;
- дискретная частота; 











 (4)
(4) 
t
Т
Отношение сигнал/шум может быть меньше 1. Требуется получить оценку фазы, такую, чтобы разница в квадрате
 была минимальной.
была минимальной.


 . Из (3) получаем :
. Из (3) получаем :
(5) 
Перемножим и пренебрежем 2й гармоникой :

(6)  - ФАПЧ
- ФАПЧ
(5) - ФНЧ, фильтрует 2-ю гармонику полностью(раз-
ностное уравнение)
Структурная схема ФАП
 - на вход
- на вход








 вх
вх 




 a
a

 синтезатор t
синтезатор t
 опоры
опоры
На вход поступает аддитивная смесь.
Принцип работы ФАП
Измеритель фазы является следящей системой с отрицатель-
ной обратной связью. Опорное колебание  с фа-
с фа-
зой - экстраполированная фаза. º  . Чем точнее
. Чем точнее
экстраполяция, т.е. чем меньше  , тем точ-
, тем точ-
нее будет оценка.
Глава 5
|
из
5.00
|
Обсуждение в статье: Динамические системы наблюдаемые на фоне |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы