 |
Главная |


Аффинные преобразования пространства
|
из
5.00
|
При работе с трехмерными объектами, часто требуется совершать по отношению к ним различные преобразования: двигать, поворачивать, сжимать, растягивать, скашивать и т.д. При этом в большинстве случаев требуется, чтобы после применения этих преобразований сохранялись определенные свойства.
Определение. Преобразование плоскости называется аффинным (от англ. affinity – родство), если
- оно взаимно однозначно;
- образом любой прямой является прямая.
Преобразование называется взаимно однозначным, если
- разные точки переходят в разные;
- в каждую точку переходит какая-то точка.
Свойства аффинного преобразования в трехмерном пространстве:
- отображает n-мерный объект в n-мерный: точку в точку, линию в линию, поверхность в поверхность;
- сохраняет параллельность линий и плоскостей;
- сохраняет пропорции параллельных объектов – длин отрезков на параллельных прямых и площадей на параллельных плоскостях.
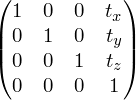
Любое аффинное преобразование задается матрицей 3x3 с ненулевым определителем и вектором переноса:
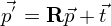
Посмотрим на это с точки зрения математики. R представляет собой матрицу линейного оператора над пространством трехмерных векторов. Вектор T требуется для осуществления параллельного переноса: если помножить ( 0 0 0 ) на любую матрицу 3x3, опять получим ( 0 0 0 ) – начало системы координат, относительно преобразования R, является неподвижно точкой. Требование, чтобы определитель был ненулевой, диктуется определением. По сути, если определитель матрицы R равен нулю, то всё пространство переходит в плоскость, прямую или точку. Тем самым не соблюдается взаимная однозначность.
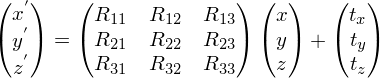
На практике удобно задавать аффинное преобразование одной матрицей. При этом используются однородные координаты, введенные в предыдущей статье. Аффинное преобразование будет задаваться следующей матрицей 4x4:
Заметим, что первые три значения последней строки равны 0. Это необходимое условие того, что преобразование будет аффинным. В общем случае произвольная матрица размера 4x4 задает проективное преобразование. Такие преобразования, как можно догадаться из названия, используются для проецирования трехмерной сцены. Подробнее об этом будет рассказано в одной из последующих статей.
Рассмотрим частные случаи аффинных преобразований.
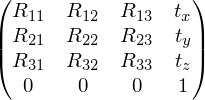
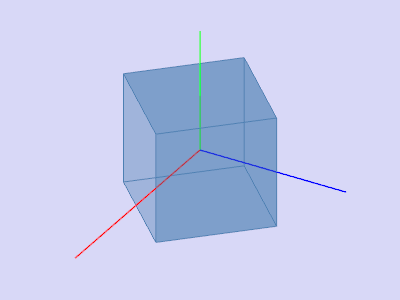
Прим. Здесь и в дальнейшем будет использоваться система координат, введенная следующим образом:
- система координат правая;
- ось z направлена на наблюдателя, перпендикулярно плоскости экрана;
- ось y находится в плоскости экрана и направлена вверх;
- ось x находится в плоскости экрана и направлена вправо.
Подробнее мы остановимся на этом при рассмотрении геометрического конвейера.
Параллельный перенос

| 
|
| Исходный объект | Параллельный перенос |
Матрица этого преобразования выглядит следующим образом:
В данном случае матрица R = E, единичной матрице.
Преобразования, рассматриваемые ниже, затрагивают только матрицу R, поэтому будет указываться только она.
Поворот (вращение)
|
| 
|
| Исходный объект | Поворот вокруг некоторого вектора |
Если на плоскости повороты делались вокруг некоторой точки, то в трехмерном пространстве повороты производятся вокруг некоторого вектора. Перед тем, как перейти к построению матрицы поворота вокруг произвольного вектора, рассмотрим частные случаи поворотов вокруг координатных осей.
Прим. Поворот вокруг произвольного вектора не равно поворот вокруг произвольной направленной прямой.
Поворот вокруг оси y
|
| 
|
| Исходный объект | Поворот вокруг оси y |
Заметим, что при повороте вокруг оси y ординаты точек (у-координаты) не меняются. Также стоит отметить, что координаты x и zточки преобразуются независимо от y-координаты. Это означает, что любая точка p(x, y, z) перейдет в точку p’(x’(x, z),y, z’(x, y)). Теперь осталось понять, как преобразуются координаты x и z: в плоскости Oxz это будет поворот вокруг начала координат по часовой стрелке (т.к. x z y - левая тройка), т.е. в отрицательном направлении. Матрица такого преобразования известна (см. Поворот плоскости):
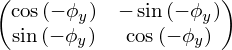
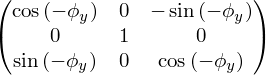
В итоге:



Матрица преобразования Ry(φy):
|
из
5.00
|
Обсуждение в статье: Аффинные преобразования пространства |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы