 |
Главная |


Тема 4.3. Автоматизированное рабочее место. Промышленные роботы
|
из
5.00
|
Типовые системы автоматизированного проектирования (САПР) создают в виде одноуровневых многоуровневых структур. Основой технического обеспечения одноуровневых САПР являются автоматизированные рабочие места (АРМ), организуемые на основе ЭВМ общего назначения и малых ЭВМ. Выбор типа ЭВМ определяется, прежде всего, сложностью объекта проектирования.
Промышленный робот - автоматическая машина, представляющая собой совокупность манипулятора и перепрограммируемого устройства управления, предназначенная для выполнения в производственном процессе двигательных и управляющих функций, заменяющих аналогичные функции человека при перемещении предметов производства и (или) технологической оснастки.
Автоматизированное рабочее место (АРМ)
Супер-АРМ эксплуатируют автономно, они предназначены для решения сложных конструкторских и технологических задач. В них используют модификации вычислительных комплексов ЕС ЭВМ со штатным набором периферийных устройств, обеспечивающих ввод, вывод, хранение и тиражирование алфавитно-цифровой и графической информации.
Средние АРМ представляют собой проблемно-ориентированные мини-ЭВМ коллективного пользования (обычно до 10 рабочих мест), предназначенные для решения широкого круга проектных задач средней сложности. Их эксплуатируют как в автономном режиме, так и в составе многоуровневых САПР. Пользователи могут: вводить в ЭВМ и просматривать в разных масштабах чертежи и их корректировать; разрабатывать в диалоговом режиме оригинальные конструкции узлов и деталей; разрабатывать кинематические, гидравлические и электрические схемы; создавать архивы чертежей; вводить и редактировать текстовые материалы; получать в результате проектирования конструкторскую и технологическую документацию, в том числе управляющие программы к станкам с ЧПУ, на которых предстоит обрабатывать спроектированные детали.
Микро АРМ организуемые на основе недорогих и высококачественных микро ЭВМ, получают наиболее широкое применение в САПР. Их эффективно используют и в качестве персональных технических средств в автономном режиме работы (персональные 16-разрядные микро ЭВМ ЕС 1840, ЕС 1850 ), и в качестве терминальных станций многоуровневых САПР (АРМ 2-01, «Автограф-840» и др.) Они также могут обслуживать одновременно несколько пользователей
Промышленные роботы
Промышленный робот автоматическая машина, представляющая собой совокупность манипулятора и перепрограммируемого устройства управления, предназначенная для выполнения в производственном процессе двигательных и управляющих функций, заменяющих аналогичные функции человека при перемещении предметов производства и (или) технологической оснастки.
Манипулятор устройство, содержащее рабочий орган, который предназначен для имитации перемещений и рабочих функций человека, и управляемое оператором или действующее автоматически.
Промышленные роботы различаются.
По области применения и видам выполняемых работ:
- для литейного производства;
- для кузнечно-прессового производства;
- для сварочного производства;
- для механической обработки;
- для термической обработки;
- для сборочных операций;
- для автоматического контроля;
- для нанесения покрытий;
- для обслуживания технологического оборудования (погрузки, разгрузки, транспор тирования, складирования и т.д.).
По признакам специализации:
- универсальные предназначены для работы совместно с различными видами обслуживаемого оборудования
- специализированные имеют более узкое назначение, обслуживая оборудование определённого вида или выполняя определённый технологический процесс
- специальные обслуживают только конкретную модель технологического оборудования
По грузоподъёмности:
- сверхлёгкие, имеющие грузоподъёмность до 1 кг;
- лёгкие – до 10 кг;
- средние – до 200 кг;
- тяжелые – до 1000 кг;
- сверхтяжелые – свыше 1000 кг.
По способу размещения
стационарные и подвижные (ПР могут быть напольными, подвесными и встраиваемыми в основное технологическое оборудование).
В зависимости от видов управления движениями исполнительных органов
- с цикловым программным управлением управление ПР, при котором осуществляется программирование последовательности выполнения его движения
- с позиционным управлением управление ПР, при котором движение его рабочего органа происходит по заданным точкам позиционирования без контроля траектории движения между ними
- с контурным управлением управление ПР, при котором движение его рабочего органа происходит по заданной траектории с установленным распределением по времени значений скорости
- с адаптивным управлением управление ПР с автоматическим изменением УП в зависимости от контролируемых параметров состояния внешней среды
Основные структурные составные части ПР
Исполнительное устройство реализует двигательные функции ПР и в общем случае состоит из манипулятора и устро йства передвижения.
Система управления совокупность функционально взаимосвязанных и взаимодействующих средств управления, обеспечивающих обучение, сохранение программы и её воспроизведение.
Информационная система совокупность взаимосвязанных и взаимодействующих технических средств, обеспечивающих получение, преобразование, обработку и передачу информации о состоянии ПР и внешней среды.
Структурная схема промышленного робота изображена на рис. 67.
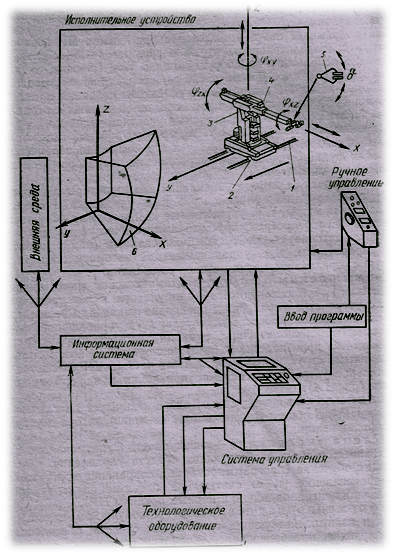
Рис.67. Структурная схема промышленного робота
1. путепровод;
2. основание;
3. корпус;
4. рука;
5. захватное устройство;
6. рабочая зона и система координат основных движений ПР, δ – направление движения зажима (захватывания) детали.
|
из
5.00
|
Обсуждение в статье: Тема 4.3. Автоматизированное рабочее место. Промышленные роботы |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы