 |
Главная |


Кинематическое исследование механизма
|
из
5.00
|
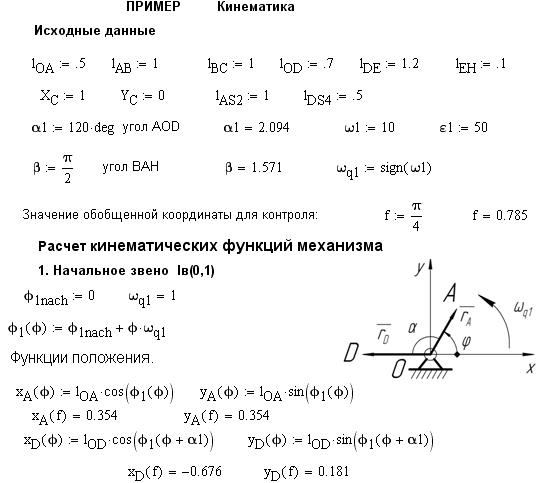
П2.1.Графоаналитический метод
При выполнении домашнего задания графоаналитическим методом все расчеты по планам скоростей и ускорений должны быть выполнены подробно.
Исходные данные:  м
м  м
м  м
м  м
м  м
м  м
м  м
м 





Векторные уравнения плана скоростей.
В векторных уравнениях большими буквами обозначены точки на плане механизма, малыми – соответствующие точки на планах скоростей и ускорений.
1. Группа IВ(0,1)
 ,
,  ,
,  ,
, 
 , ,
, , 

Масштабный коэффициент плана скоростей 
 ,
,
где  - отрезок плана скоростей.
- отрезок плана скоростей.
(Величины отрезков плана приведены в таблице на листе Приложения 2)
2. Группа IIВВВ(2,3)
2.1. Скорость т. B.



2.2. Угловая скорость звена 2.
 ,
,  направлена по часовой стрелке
направлена по часовой стрелке
Направление получим следующим образом: условно поместив вектор  в т. B плана механизма, определим, какому направлению при вращении т.B вокруг т.A соответствует этот вектор.
в т. B плана механизма, определим, какому направлению при вращении т.B вокруг т.A соответствует этот вектор.
2.3. Скорость т. S2 .
Скорость т. S2 можно получить тремя способами:
--- 
 ,
, 
--- 

--- используя свойство подобия планов механизма и скоростей (ускорений): фигура, образованная точками одного звена, подобна фигуре, образованной концами векторов абсолютных скоростей (ускорений) тех же точек звена на плане скоростей (ускорений).
 подобен
подобен 


Соединив полученную на плане т.  с полюсом плана
с полюсом плана  , получим вектор
, получим вектор  , соответствующий абсолютной скорости т.
, соответствующий абсолютной скорости т.  .
.
2.4. Скорости точек  и
и  , принадлежащих звену 2, могут быть найдены так же, как и скорость т. S2 (См. п.2.3.). Чтобы найти скорость и ускорение т.
, принадлежащих звену 2, могут быть найдены так же, как и скорость т. S2 (См. п.2.3.). Чтобы найти скорость и ускорение т.  целесообразно рассмотреть эквивалентный в кинематическом отношении механизм, у которого поступательная пара между звеньями 2 и 5 совмещена с вращательной.
целесообразно рассмотреть эквивалентный в кинематическом отношении механизм, у которого поступательная пара между звеньями 2 и 5 совмещена с вращательной.
2.5. Угловая скорость 3-го звена.
 ,
,  направлена против часовой стрелки
направлена против часовой стрелки
3. Группа IIВВП(4,5)
3.1. Скорость т. E.


3.2. Угловая скорость 4-го звена.
 ,
,  направлена по часовой стрелке
направлена по часовой стрелке
3.3. Скорость т.  может быть найдена методом пропорционального деления
может быть найдена методом пропорционального деления

4. Расчет скоростей.
Численное значение скорости получим, разделив соответствующий отрезок плана скоростей на  . Например:
. Например:



Контрольные результаты расчета скоростей поместим в Таблицу 4.
Таблица 4
| ω2 | ω3 | ω4 | VS2 | VS4 |
| -0,967 | +4,517 | +3,771 | 4,243 | 5,891 |
Векторные уравнения плана ускорений.
Рекомендуется строить план ускорений в среде AutoCAD (или аналогичной среде) в масштабе 1:1 (откладывать отрезки плана, численно равные вычисляемым истинным величинам), что позволяет избежать ошибок и излишних расчетов. Окончательно масштабный коэффициент плана назначается после его построения из соображений рационального размещения на листе. Выбранный коэффициент используется в дальнейшем для расчета искомых величин.
Группа IВ(0,1)
 ,
, 

 ,
,  Масштабный коэффициент плана ускорений
Масштабный коэффициент плана ускорений 
 ,
,
где  - отрезок плана ускорений, соответствующий нормальному ускорению
- отрезок плана ускорений, соответствующий нормальному ускорению  .
.

 ,
, 

 ,
, 




Отрезки на плане:  ,
, 
(Величины отрезков плана приведены в таблице на листе Приложения).
2. Группа IIВВВ(2,3)
2.1. Ускорение т. B.




отрезки на плане:  ,
, 
2.2. Угловое ускорение звена 2.
 ,
,  направлено против часовой стрелки
направлено против часовой стрелки
Направление получим следующим образом: условно поместив вектор  в т. B плана механизма, определим, какому направлению при вращении т.B вокруг т.A соответствует этот вектор.
в т. B плана механизма, определим, какому направлению при вращении т.B вокруг т.A соответствует этот вектор.
2.3. Ускорение т. S2 .
Ускорение т. S2 можно получить тремя способами:
---  ,
, 



--- 


--- используя свойство подобия планов:
подобен
Соединив полученную на плане т. с полюсом плана , получим вектор , соответствующий абсолютному ускорению т. .
2.4. Ускорения точек и , принадлежащих звену 2, могут быть найдены так же, как и ускорение т. S2 (См. п.2.3.).
2.5. Угловое ускорение звена 3.
 ,
,  направлено против часовой стрелки
направлено против часовой стрелки
3. Группа IIВВП(4,5)
3.1. Ускорение т. E.





Отрезок на плане, соответствующий  :
: 
3.2. Угловое ускорение звена 4.
 ,
,  направлено против часовой стрелки
направлено против часовой стрелки
3.3. Ускорение т. может быть найдено методом пропорционального деления
4. Расчет ускорений. Численное значение ускорения получим, разделив соответствующий отрезок плана ускорений на  . Например:
. Например:


Контрольные результаты расчета ускорений поместим в Таблицу 5.
Таблица 5
 2 2
| 3
| 4
| aS2 | aS4 |
| +27,324 | +45,681 | +158,307 | 81,273 | 14,944 |

П2.2.Аналитический метод. Алгоритм.
 Группа IB(0,1)
Группа IB(0,1)
Дано:  ,
,  ,
, 

Примем 

Рис. 21.
Группа Ассура IIBBB(2,3)
 Дано:
Дано:  ,
,  ,
,  ,
,  ,
, 
Найти:  ,
, 
Условие замкнутости 
В проекциях 
Рис. 22.
Начальные приближения 

Функции и находятся из решения полученной системы уравнений в блоке Given – Find.
Группа Ассура IIВВП(4,5)
Дано:  ,
,  , ,
, ,  ,
,

Найти:  ,
, 
Условие замкнутости 
В проекциях

После преобразований
Рис. 23.

Начальные приближения 

Функции и находятся из решения полученной системы уравнений в блоке Given – Find.
Вспомогательные контуры
т. т.  т.
т. 



т. т.


П2.3. Модуль Mathcad






Для контроля результатов кинематического анализа, полученных двумя методами, зная закон движения входных звеньев в реальном времени (  ,
,  ), некоторые полученные аналоги скоростей и ускорений пересчитываются в истинные скорости и ускорения при заданном (указанном преподавателем) значении обобщенной координаты.
), некоторые полученные аналоги скоростей и ускорений пересчитываются в истинные скорости и ускорения при заданном (указанном преподавателем) значении обобщенной координаты.
Например:  ,
,  ,
,  ,
,  - при этих значениях угловой скорости и углового ускорения начального звена был выполнен кинематический анализ графоаналитическим методом.
- при этих значениях угловой скорости и углового ускорения начального звена был выполнен кинематический анализ графоаналитическим методом.

Полученные результаты сравниваются со значениями из Таблиц 4 и 5
Приложение 3
|
из
5.00
|
Обсуждение в статье: Кинематическое исследование механизма |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы