 |
Главная |


Частные случаи интеграла Мора
|
из
5.00
|
ГЛАВА 5. ТЕОРИЯ ОПРЕДЕЛЕНИЯ ПЕРЕМЕЩЕНИЙ
Основные понятия
При расчете строительных конструкций по второй группе предель-ных состояний строительными нормами ограничивается максимальное пе-ремещение их точек. Это относится, прежде всего, к конструкциям, пере-крывающим большие пролеты. Величины максимально допустимых пере-мещений f выражаются в частях от пролета L (например, 1/300-1/500 от L) в зависимости от типа конструкции и условий ее работы (рис. 5.1).
q
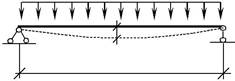
f
L
Рис. 5.1
Такая задача требует вычисления переме-щений точек системы. В этих случаях го-ворят о расчете конструкции на жест-кость.
Существует также целый ряд задач строительной механики, тре-бующие вычисления перемещений. Например, расчет статически неопре-делимых систем методом сил, динамический расчет и др.
Перемещения точек плоской стержневой системы будем обозначать буквой ∆ ( или δ) с двумя индексами ∆ ij, где первый индекс i отмечает на-правление перемещения, а второй индекс j указывает на причину, вызы-вающую данное перемещение.
| θ k | В общем случае перемещение сечения k плоской | ||
| u k | стержневой системы ∆ K раскладывается на три со- | ||
| ставляющих (три степени свободы): uk −горизонталь- | |||
| v k | ∆ k | ная составляющая; v k − вертикальная составляющая; θ k | |
| Рис. 5.2 | − угол поворота (рис. 5.2). |

Укажем три основные причины возникновения перемещений:
– силовое воздействие;
– температурное воздействие;
– смещение опорных связей. Рассмотрим отдельно каждый случай.
Определение перемещений от силового воздействия
| q | В результате действия силовой нагрузки систе- | ||
| k | k’ | ма деформируется (рис. 5.3). В общем случае имеют | |
| место 3 вида деформаций: а) изгиб; б)сжатие- | |||
| растяжение;в) сдвиг.Однако сдвиговые деформации | |||
| малы, ими можно пренебречь | |||
| F | Остановимся на некоторых понятиях, исполь- | ||
|
Рис. 5.3 | зуемых в теории перемещений. | ||
61
Действительное состояние –это состояние,на котором система де-формируется под действием силовой нагрузки (рис. 5.3).
Возможное (единичное) состояние–это состояние,когда система за-гружена единичным силовым фактором, приложенным по направлению ис-комого помещения.На рис. 5.4Показаны возможные состояния для опре-деления горизонтального, вертикального и углового перемещения точки k.
| F=1 | M=1 | ||||||||||||||||||
| а) | F=1 | б) | в) | ||||||||||||||||
| k | k | k | |||||||||||||||||



Рис. 5.4. Возможные состояния при определении:
а) горизонтального перемещения точки k;
б) вертикального перемещения точки k;
в) поворота сечения k.
Методы нахождения перемещений базируются на вычислении рабо-ты сил упругой системы. Необходимо различать понятия действительной и возможной работы сил на перемещениях.
F 1
∆ 11
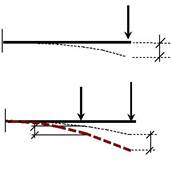
| F 2 | F 1 |
| ∆ 22 | ∆ 12 |
Действительная работа –работа силы наперемещении, вызванном этой же силой. Такая работа равна половине произведе-нию силы на перемещение. Например, сила F 1 совершает действительную работу наперемещении ∆ 11.
Рис. 5.5
Выражение такой работы будет T11 = 12 F1 ⋅ ∆11 .

Например, для балки на рис. 5.5. Сила F 2 совершает действительную работу T22 = 12 F2 ⋅ ∆22 .

Возможная работа −это работа силы на перемещении,вызванномдругой силой. Она равна произведению силы на перемещение. Сила F 1 со-вершает возможную работу на перемещении ∆ 12 (это перемещение вызвано силой F 2) по выражению T12 = F1 ⋅ ∆12 . Здесь первый индекс связан с его
направлением перемещения,второй указывает номер силы,вызывающейэто перемещений.
Для деформируемой системы следует учесть работу как внешних сил (создающих деформации), так и внутренних сил, которые сопротивляются деформациям. Работу внешних сил будем обозначать T ij.. Работу внутрен-них − W ij.
62
| q | ∆ =u k ds | ds | |||
| F=1 | |||||
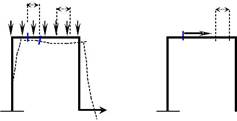
| а) | k | k’ | б) | k | |
| F |
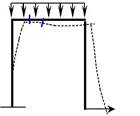
Дальнейшие выводы сделаем на примере рамы , в которой требует-ся определить горизонтальное пе-ремещение точки k. Покажем действительное и возможное со-стояние рамы (рис. 5.6).
Рис. 5.6. Состояния рамы:
а) состояние1 (действительное состояние); б) состояние2 (возможное состояние)
Запишем выражение возможной работы силы F=1 возможного со-стояния (состояния 2) на перемещениях действительного состояния (со-стояния 1)
| T 21 = F· ∆ =1· ∆ . | (5.1) |
Далее определим выражение возможной работы внутренних сил состоя-ния 2 на перемещениях состояния 1.Для этого вырежем элементарный(бесконечно малый) участок рамы длиной ds. Деформации будем брать с действительного состояния,а внутренние усилия с возможного.Все уси-лия, относящиеся к возможному состоянию, обозначим подчеркиванием над символом. Будем считать, что перемещения возникают в результате деформаций изгиба и сжатия-растяжения. Тогда продольная сила будет совершать работу на удлинении (укорочении) стержня ∆ ds, а момент на угле поворота – d ϕ. Так как мы рассматриваем участок ds, это будет выра-жение элементарной работы dW 2 1 = N· ∆ ds+M·d ϕ .
Далее выразим ∆ ds и d ϕ через ds. Так как осевая деформация стержня ε есть отношение приращения ∆ ds к первоначальной длине ds
(ε = ∆ ds ds ), то ∆ ds = ε ·ds.


d ϕ
Состояние 1 ρ
| ds |
| ds | |||
| ∆ ds | |||||

Состояние 2
| N | N |
|
| |||||||
| M | ||||||||||
| ds | ||||||||||
| ds | ||||||||||
Рис. 5.7




 M Тогда dW 2 1 =( N· ε +M· χ ) ·ds
M Тогда dW 2 1 =( N· ε +M· χ ) ·ds





