 |
Главная |


КРИВОЛИНЕЙНЫЕ СТЕРЖНИ.
|
из
5.00
|
Выведем уравнение динамики для криволинейных стержней. Особенностью работы конструкции при динамическом воздействии является необходимость учитывать силы инерции, связанные с относительным перемещением точки деформируемого тела. Принципиально эта проблема решается путем добавления инерциального слагаемого в правую часть уравнения равновесия, которое после добавки называют уравнением движения. Следовательно, для статических задач это слагаемое не учитываем.
Принимаем обозначения:
n – нормаль, b – бинормаль, t – касательная, F – некоторая сила, S – параметр, имеющий смысл длины дуги и dS – сама длина дуги, r – радиус-вектор точки, U - поле перемещений (задано в разложении по подвижному векторному базису материального волокна:  ),
),  - удлинение, k – кривизна, t - крутка. [25], [22]
- удлинение, k – кривизна, t - крутка. [25], [22]

Определим вид системы уравнений движения стержня с пространственно кривой осью. С этой целью, запишем уравнения равновесия элемента стержня бесконечно малой длины ds в форме предложенной Даламбером.
В дальнейших рассуждениях будем полагать, что поле перемещений, внутренние силовые факторы в сечении стержня, а также интенсивность внешней нагрузки q, – есть функции двух переменных: дуговой координаты и времени. Производную по времени будем обозначать точкой.
Уравнение равенства нулю главного вектора всех сил, действующих на элемент стержня, получается очевидным образом при суммировании внутренних сил в сечениях элемента стержня, переносных инерционных сил и внешней нагрузки, в векторной форме оно имеет вид:
 . (2.1)
. (2.1)
Разложив вектора, входящие в уравнение (2.1) по собственному базису оси стержня и учтя формулы Френе-Серре, можно переписать последнее соотношение в виде системы дифференциальных уравнений:
 . (2.2)
. (2.2)
Уравнение равенства нулю главного момента всех сил формально состоит из трех слагаемых:
 , (2.3)
, (2.3)
где:
· dM – главный вектор всех моментов, возникающих в сечениях элемента стержня;
· dMF – главный вектор моментов сил, возникающих в сечениях элемента стержня;
· dMI – вектор инерционных моментов.
Вид первого слагаемого очевиден:
 , (2.4)
, (2.4)
также очевидным представляется и третье слагаемое:
 , (2.5)
, (2.5)
где Jt, Jn, Jb – моменты инерции сечения стержня относительно осей, направленных вдоль соответствующих базисных векторов.
Для выяснения природы второго слагаемого равенства (2.3) обратимся к общей записи момента некоторой силы F, приложенной к концу элемента стержня в точке O1 (см. рис.2) относительно другого его конца – O2.
По определению момента, согласно рис.2, имеем:
 . (2.6)
. (2.6)
Представим dr* в виде суммы и удержим в разложении слагаемых только выражения стоящие при первых степенях приращения дуговой координаты Ds. Таким образом, в разложении по базису векторов трехгранника Френе, будем иметь:
 . (2.7)
. (2.7)
Раскроем правую часть последнего соотношения, используя формулы дифференцирования векторов, а также правила векторного умножения взаимно ортогональных базисных векторов, приведем окончательный вид равенства для вычисления момента силы F:
 (2.8)
(2.8)
Используем полученное соотношение (2.8) для записи главного момента сил, относительно конца стержня O2. Сгруппировав выражения, стоящие при одинаковых силах, получим:
 (2.9)
(2.9)
Рассмотрев выражения стоящие в скобках при каждой силе, можно заметить, что согласно (2.3), (2.4) и (2.5):
·  – угол поворота сечения вокруг бинормали;
– угол поворота сечения вокруг бинормали;
·  – угол поворота сечения вокруг нормали;
– угол поворота сечения вокруг нормали;
·  – линейный вариант выражения удлинения материального волокна.
– линейный вариант выражения удлинения материального волокна.
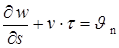
Выпишем систему уравнений равновесия элемента стержня в скалярной форме:
 (2.10)
(2.10)
Чтобы замкнуть приведенную систему уравнений, необходимо дополнить ее геометрическими и физическими уравнениями связи между различными параметрами напряженно-деформированного состояния стержня, как, например, формулы связывающие углы поворота сечения и компоненты вектора перемещений, связь продольной силы N и продольной деформации оси стержня.
Следует отметить, что система (2.10) имеет геометрически нелинейный вид, это обусловлено тем, что уравнения системы записаны опираясь на геометрию актуального состояния стержня. Тем самым учитываются нелинейные эффекты, связанные с влиянием значительной деформации и поворотов сечения на напряженно-деформированное состояние стержня. [22], [25]
Решение такого рода задач является, само по себе, серьезной проблемой механики деформируемого твердого тела, заслуживающее отдельного рассмотрения, по этому это выходит за рамки данной работы.
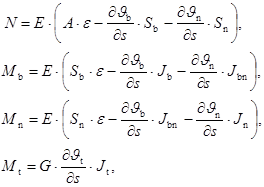
Предположим, что перемещения и деформации стержня невелики, это позволяет линеаризовать систему уравнений, записав ее в геометрии начального состояния:
 . (2.11)
. (2.11)
Дополним систему (2.11) уравнениями связи. Кинематические соотношения уже известны, получим уравнения связи силовых и кинематических параметров состояния, используя закон Гука и определение внутренних силовых факторов как интегральных характеристик поля напряжений в сечении стержня.
Напряжения в любой точке сечения стержня можно, согласно закону Гука, записать как:
 , (2.12)
, (2.12)
подставив в это соотношение представление деформации, принимая деформацию оси стержня по линейному варианту, получим:
 , (2.13)
, (2.13)
где e – деформация оси стержня:
 .
.
Используя равенство (2.13) легко можно вычислить все внутренние силовые факторы в сечении стержня по классическим формулам:
 , (2.14)
, (2.14)
 , (2.15)
, (2.15)
 , (2.16)
, (2.16)
 , (2.17)
, (2.17)
 ,
,  . (2.18)
. (2.18)
Вычислив интегралы в равенствах (2.14) – (2.18), имеем:
 (2.19)
(2.19)
где
·  – статические моменты сечения стержня; (2.20)
– статические моменты сечения стержня; (2.20)
·  – (2.21)
– (2.21)
· осевые и полярный моменты инерции сечения;
·  – центробежный момент инерции сечения стержня; (2.22)
– центробежный момент инерции сечения стержня; (2.22)
Согласно введенным в предыдущем параграфе гипотезам можно сказать, что статические моменты и центробежный момент инерции сечения стержня равны нулю. В этом случае уравнения (2.19) примут более простой вид:
 (2.23)
(2.23)
Выпишем на основании (2.23) систему уравнений, описывающих линейно-упругие связи между обобщенными деформациями и внутренними силовыми факторами:
 . (2.24)
. (2.24)
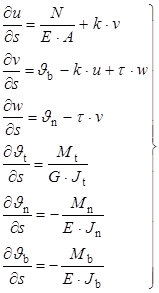
Объединение (2.11) и (2.24) в единую систему уравнений приводит к решению поставленной цели этого раздела:
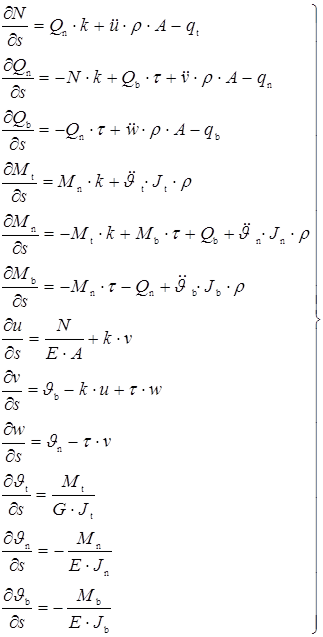 (2.25)
(2.25)
Здесь N – продольная сила, Qn, Qb – поперечные силы, Mt – крутящий момент, Mn, Mb – изгибающие моменты, u, v, w – компоненты перемещения,  -углы поворота относительно главных центральных осей инерции, k – кривизна, t - крутка, ЕА – жесткость, Е – модуль упругости, q – нагрузка, G – модуль сдвига, It, In, Ib – моменты инерции,
-углы поворота относительно главных центральных осей инерции, k – кривизна, t - крутка, ЕА – жесткость, Е – модуль упругости, q – нагрузка, G – модуль сдвига, It, In, Ib – моменты инерции,  - инерция поворота.
- инерция поворота.
Таким образом, полученная система уравнений (2.25), в общем виде, может быть использована для решения задач о вынужденных движения пространственно кривого стержня. В этом случае ее необходимо дополнить условиями на краях, а также начальными условиями. [22]
Также она легко модифицируется для постановки статических задач и проблемы собственных движений путем исключения ненужных слагаемых, постановки задач для частных видов геометрии и состояний стержней, таких как, например: прямой стержень, стержень, ось которого имеет постоянные кривизну и крутку и т.п.
Мы получили систему уравнений 12-ого порядка. Решать ее проблематично. Но даже если она решена, то возникает проблема – объединение стержней в единую систему. У криволинейного стержня локальная система координат определяется трехгранником Френе. Чтобы соединить два и более стержней в единую систему, надо уметь пересчитывать локальные координаты в глобальные, т. е. преобразовывать компоненты векторов перемещения, сил и моментов из координат, связанных с подвижным трехгранником в неподвижную ДПСК.
|
из
5.00
|
Обсуждение в статье: КРИВОЛИНЕЙНЫЕ СТЕРЖНИ. |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы