 |
Главная |


Вариационный принцип Лагранжа.
|
из
5.00
|
Теоретическая основа МКЭ базируется на известном принципе возможных перемещений Лагранжа, который формулируется так: «если система материальных точек находится в равновесии, то работа всех приложенных к ней сил на любых возможных бесконечно малых отклонений от положения равновесия равна нулю». [16]
Использовать принцип Лагранжа целесообразно потому, что в задаче динамики присутствуют силы инерции, которые определяются через перемещения.


 (безразмерная величина)
(безразмерная величина)
 (3.2.1)
(3.2.1)
 3.2.2)
3.2.2)
|

Элементарная работа внутренних сил:
В последней формуле символ «d» обозначает кинематически допустимую вариацию, т.е. произвольно изменяется поле перемещений на бесконечно малую величину d`u, причем кинематчески краевые условия (ограничения на перемещение некоторых точек тела) остаются справедливыми как для вектора перемещений `u, так и для его вариации.
При малых деформациях объем, по которому производится интегрирование, можно считать неизменным, и поменять местами символы интегрирования и варьирования.
Если выполняется обобщенный закон Гука, то подынтегральное выражение есть квадратичная форма по компонентам деформации:
sij eij = Ckmij ekm eij, тогда
 (3.2.3)
(3.2.3)
Работа внутренних сил:
 (3.2.4)
(3.2.4)
Элементарную работу внутренних сил для упругого тела отождествляют с потенциальной энергией деформируемого состояния. [11]
Если к телу приложены внешние массовые, поверхностные и сосредоточенные силы, то они совершают работу на перемещениях точек, лежащих внутри тела и на его границах.
Если задана кинематически допустимая вариация d`u, то элементарная работа внешних сил вычисляется по формуле:
 (3.2.5)
(3.2.5)
Векторы `rm есть радиус-векторы точек приложения сосредоточенных сил `Pm.
Если пренебречь эффектами выделения тепла при деформировании и считать процесс деформации адиабатическим, то элементарные работы внешних и внутренних сил равны между собой. Тогда вариационное уравнение принимает вид:
 (3.2.6)
(3.2.6)
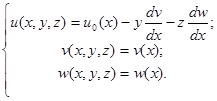
Представленная общая форма принципа возможных перемещений может быть модифицирована путем принятия некоторых кинематических и статических гипотез. В частности для стержней гипотеза Бернулли приводит к тому, что из всех слагаемых, определяющих потенциальную энергию деформаций ненулевым становится только одно, определяющее деформацию растяжения/сжатия волокон, параллельных оси стержня. [3]
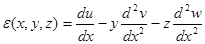
В связи с тем, что принятие этой гипотезы приводит к линейному распределению перемещений по площади поперечного сечения, а также к линейному распределению деформаций, то можно вычислить интегралы по площади поперечного сечения.
Тогда вариационное уравнение будет содержать только интеграл по длине стержня
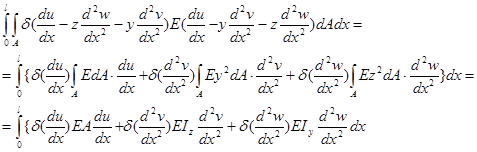

 (3.2.7)
(3.2.7)
Все слагаемые с поперечными координатами в первой степени и их произведениями уничтожаются при интегрировании, т.к. выбранная система координат есть главная центральная система поперечного сечения. [11]
В теории стержней помимо сосредоточенных сил рассматриваются сосредоточенные моменты. Дополним выражением вариационного принципа возможной работой сосредоточенных моментов Мx, Мy, Мz [Н-м]

Окончательно принцип возможных перемещений для стержня следует записать в виде:


 (3.2.8)
(3.2.8)
|
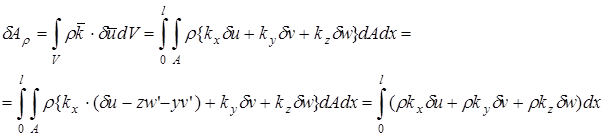
Данная формула справедлива только в том случае, если компоненты массовой силы kx, ky, kz равномерно распределены по поперечному сечению с координатой х, а также при постоянной по сечению плотности.
 (3.2.9)
(3.2.9)
Последние два интеграла представляют собой работу сосредоточенной силы и сосредоточенного момента, которые являются главным вектором и главным моментом распределенной по торцу нагрузки q. [30]
 (3.2.10)
(3.2.10)
 ,
, 

Приведенные рассуждения показывают, что распределенные по торцам нагрузки действительно можно заменить их главными векторами и главными моментами относительно центра тяжести поперечного сечения.
Проделаем аналогичное рассуждение для произвольного поперечного сечения с текущей координатой х и рассмотрим работу нагрузок, распределенных по боковой поверхности стержня.

(3.2.11)
qt = `q×`n(r)
Распределенными изгибающими и крутящими моментами для тонких стержней обычно пренебрегают в силу малости этих величин, имеющих порядок mx, my, mz ~  где а – характерный поперечный размер стержня.
где а – характерный поперечный размер стержня.
В дальнейшем при построении варианта метода конечных элементов для расчета стержней и стержневых систем будем использовать формулировку вариационного принципа (3.2.8), пренебрегая распределенными моментами mx, my, mz.
Будем рассматривать вариант метода конечных элементов в перемещениях на основании вариационного уравнения Лагранжа. Будем считать, что конечно-элементная сетка задана, т.е. установлено соответствие между номерами узлов и номерами конечных элементов и определены координаты узлов. Для каждого конечного элемента будем считать заданными функции формы так, что перемещение произвольной точки, принадлежащей конечному элементу, однозначно определяется перемещениями его узлов
`u(`r) = [Ф(`r)]`qn, `r Î vn (3.2.12)
vn – многогранник, определяющий конечный элемент. Введем в рассмотрение векторы напряжений и деформации
`s = {s11 s22 s33 s12 s23 s13}
`e = {e11 e22 e33 e12 e23 e13} (3.2.13)
так, что произведение этих двух векторов дает работу
dA(r) = d`e T`s (`r )
`r – радиус-вектор произвольной точки.
|
из
5.00
|
Обсуждение в статье: Вариационный принцип Лагранжа. |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы