 |
Главная |


Конечный элемент стержня в локальной системе координат.
|
из
5.00
|
Благодаря тому, что выбранная система координат включает в себя главные центральные оси инерции поперечного сечения, вариационный функционал Лагранжа можно разделить на 4 части, каждая из которых будет включать в себя единственную искомую функцию
 (3.3.1) (растяжение/сжатие)
(3.3.1) (растяжение/сжатие)
 (3.3.2) (кручение)
(3.3.2) (кручение)


 (3.3.3)
(3.3.3)
(оба изгиба в главных плоскостях поперечного сечения).
В силу независимости вариационных уравнений (3.3.1 – 3.3.3) четыре сформулированные уравнения можно решать раздельно. [1]
|
1) При выборе функции формы для такого конечного элемента ограничимся полиномами, степень которых обеспечивает ненулевые производные необходимого порядка: для растяжения/сжатия и кручения минимальная степень полинома равна 1, для изгиба - 2.
v(x) = u1(1 – x/l) + u2x/l - для растяжения/сжатия (3.3.4)
j(x) = j1(1 – x/l) + j2x/l - для кручения
Для изгиба удобнее выбирать полиномы третьей степени, причем в качестве основных неизвестных следует задавать поперечные перемещения узлов и углы поворота узловых сечений. [13]
v(x) = a0 + a1x + a2x2 + a3x3
v(x) = v1 P1(x) + J1lP2(x) + v2 P3(x) + J2lP4(x)


P1(x) = 1 - 3x2 + 2x2, где x = x/l
P2(x) = x(1 - x)2
P3(x) = x2(2 - 3x)
P4(x) = x2(x - 1) (3.3.5)
Матрица градиентов для этих случаев представляет собой скалярные операторы:

Вектор деформации:

Работа внутренних сил при растяжении:

Матрица жесткости в локальных координатах:

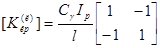
Для плоского изгиба матрица дифференциальных операторов имеет вид

Матрица градиентов функции форм:

Матрица жесткости при изгибе:

 (3.3.6)
(3.3.6)
Момент инерции в этой формуле выбирается в зависимости от плоскости изгиба.
Рассмотрим элементарную работу распределенных нагрузок. Для растяжения/сжатия


 Если нагрузка px постоянна, то выражение для вектора х можно вычислить аналитически
Если нагрузка px постоянна, то выражение для вектора х можно вычислить аналитически

|
2) Важным частным случаем растяжения является растяжение или сжатие собственным весом.
Sx = -N(x) + rgAx = 0
N(x) = rgAx
Nx(0) = 0; Nx(l) = rgAl
 где
где 
Введенные расчетные формулы пригодны и для кручения, только в них под распределенной нагрузкой следует понимать распределенный крутящий момент mx, а вектор узловых нагрузок будет состоять из двух крутящих моментов, приложенных в узлах конечных элементов в статически эквивалентных к распределенному моменту.
 (3.3.7)
(3.3.7)
При изгибе распределенная поперечная нагрузка совершает элементарную работу:
`Ru - вектор узловых поперечных сил и изгибающих моментов
 (3.3.8)
(3.3.8)
Нагрузка pnon есть либо py либо pz в зависимости от плоскости изгиба.
Рассмотрим физический смысл компонент матрицы жесткости. С этой целью запишем уравнение состояния одного конечного элемента:
[k]`q = `R
В соответствии с этой формулой можно утверждать, что произведение [k]`q имеет размерность силы; так как `R внешняя сила, то указанное произведение есть внутренняя сила и уравнение состояния имеет смысл уравнения равновесия. [11]
 Поясним физический смысл компонент матрицы жесткости на примере конечного элемента стержня, работающего на плоский изгиб.
Поясним физический смысл компонент матрицы жесткости на примере конечного элемента стержня, работающего на плоский изгиб.
|

q3 = v2 = 0
q4 = Q2 = 0
q2 = Q1 = 0
`q(1) = {1; 0; 0; 0}
Q1 = K11
M1 = K12
Q2 = K13
M2 = K14
Физический смысл коэффициентов матрицы жесткости следующий: диагональная компонента матрицы жесткости равна внешней нагрузке, которую следует приложить к одному из узлов конечного элемента в схеме закрепления конечных элементов, когда у выбранного узла свободной является только одна из степеней свободы; внешняя нагрузка, соответствующая этой степени свободы должна обеспечивать перемещение, равное единице. Все остальные внедиагональные компоненты равны опорным реакциям, возникающим в этой схеме закрепления. [17]
|
 Из физического смысла компонент матрицы жесткости следует положительность диагональных коэффициентов и из теоремы взаимности перемещения – симметрии матрицы. Ранг матрицы жесткости равен разности между количеством степеней свободы конечных элементов (количество компонент вектора узловых перемещений) и количеством степеней свободы конечных элементов как абсолютно твердого тела.
Из физического смысла компонент матрицы жесткости следует положительность диагональных коэффициентов и из теоремы взаимности перемещения – симметрии матрицы. Ранг матрицы жесткости равен разности между количеством степеней свободы конечных элементов (количество компонент вектора узловых перемещений) и количеством степеней свободы конечных элементов как абсолютно твердого тела.
 Все приведенные рассуждения относились к локальной координатной системе, связанной с конечными элементами.
Все приведенные рассуждения относились к локальной координатной системе, связанной с конечными элементами.
|
Рассмотрим возможные способы пересчета перемещения стержня из локальных в глобальные координаты.
Взаимное расположение двух систем координат характеризуется одним параметром
`u = ux`x0 + uh`h0 = ux`x0 + uy`y0
ux = ux`x0 × `x0 + uy`y0 ×`x0 | × `x0
uh = ux`x0 × `h0 + uy`y0 ×`h0 | × `h0
В матричной форме это уравнение имеет вид:
`u(л) = [cos]`u(г)
 (3.3.9)
(3.3.9)
[cos] – матрица направляющих косинусов в глобальной и локальной системе координат. Для пересчета вектора узловых перемещений в глобальные координаты отметим, что он составляется из векторов перемещений узлов, следовательно, каждый из этих векторов должен преобразовываться независимо от другого. [10] Тогда матрица преобразования вектора узловых перемещений будет блочно-диагональной
 (3.3.10)
(3.3.10)
Здесь n, n+1 – номера узлов конечного элемента; диагональные подматрицы определены формулой (3.3.9). Для прямого стержня диагональные подматрицы одинаковы, для криволинейного стержня могут быть разными. Тогда формула пересчета вектора узловых перемещений из локальных координат в глобальные может быть записана следующим образом

(d`qг)T[сos]T{[K][с os]`qг -`Rл} = 0
(d`qг)T{[Kг]`qг - `Rг} = 0

Последнее выражение переводит матрицу жесткости с индексом m из локальных в глобальные координаты.
Матрица жесткости одного конечного элемента имеет вид (см. Приложение 1)
 (3.3.11)
(3.3.11)
Эта формула пересчитывает вектор узловых нагрузок из локальных в глобальные координаты.
Вектор узловых нагрузок имеет следующий вид: 
Разрешающее уравнение МКЭ в глобальных координатах  – система равновесия (или движения) узлов конечных элементов в проекциях на оси глобальной системы координат.
– система равновесия (или движения) узлов конечных элементов в проекциях на оси глобальной системы координат.
Для конечного элемента стержня в пространственной системе координат рассуждения полностью сохраняются; отличия заключаются в том, что и локальная и глобальная системы координат являются трехмерными и исходным для вывода матрицы направляющих косинусов является тождество
u x ` x 0 + u h ` h 0 + u V ` V 0 = ux ` x0 + uy ` y0 + uz ` z0.
ux = ux`x0 × `x0 + uy`y0 ×`x0 + uz`z0 ×`x0
uh = ux`x0 × `h0 + uy`y0 ×`h0 + uz`z0 ×`h0
uz = ux`x0 × `z0 + uy`y0 ×`z0 + uz`z0 ×`z0
Скалярное произведение единичных векторов локальных и глобальных координат могут быть выражены через три независимых угла Эйлера. [10]
Используем матрицу направляющих косинусов, имеющую следующий вид (здесь углы Эйлера обозначены через j, y, q): [8]

Матрица перехода от локальных координат к глобальным для криволинейного стержня будет иметь вид

где

 - вектор узловых перемещений в локальных координатах.
- вектор узловых перемещений в локальных координатах.
 =
=  - вектор узловых перемещений в глобальных координатах
- вектор узловых перемещений в глобальных координатах
Здесь u , v , w – компоненты вектора перемещений, j - угол закручивания,  - углы поворота поперечного сечения относительно главных центральных осей инерции, N – продольная сила, Qy , Qz – поперечные силы, М x , My , Mz – моменты.
- углы поворота поперечного сечения относительно главных центральных осей инерции, N – продольная сила, Qy , Qz – поперечные силы, М x , My , Mz – моменты.
Если соединение конечных элементов в ансамбль осуществляется по всем степеням свободы узлов и деформации системы малы, то матрицу направляющих косинусов можно считать постоянной; в противном случае необходимо учитывать возможность конечных поворотов локальной координатной системы относительно глобальной. В этом случае в качестве независимых параметров, определяющих взаимную ориентацию координатных систем вместо углов Эйлера удобнее использовать параметры Родрига-Гамильтона.
Удобство заключается в том, что упомянутые параметры связаны с угловой скоростью вращения локальной координатной системы относительно глобальной квазилинейным дифференциальным уравнением первого порядка. [30]
|
из
5.00
|
Обсуждение в статье: Конечный элемент стержня в локальной системе координат. |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы