 |
Главная |


Сетка конечных элементов для витка пружины
|
из
5.00
|
Для построения МКЭ-модели витка пружины введем следующие параметры сетки, принимая за основной полный полярный угол витка jmax=2p. Количество конечных элементов N е полностью определяет матрицу связей, которая вычисляется элементарно:

( 4.18)
Здесь n1, n2 – глобальные номера узлов, соответствующие локальным номерам 1 и 2.
Координаты узлов в глобальной декартовой системе вычисляются по формулам ( 4.1):

( 4.19)
Для формирования матриц направляющих косинусов определим локальную систему координат конечного элемента, направляя ось x вдоль оси стержня. В глобальных координатах единичный вектор этой оси имеет вид:

( 4.20)
Считая, что виток имеет круглое сечение, главные центральные оси инерции поперечного сечения можем выбирать произвольно. Примем, что одна из них направлена перпендикулярно плоскости, которая проходит через ось конечного элемента и перпендикулярна координатной плоскости xOy глобальной системы координат. Ее единичный вектор имеет вид:

( 4.21)
Тогда третий единичный вектор определим так, чтобы они образовывали правую тройку:

( 4.22)
Компоненты этих векторов образуют матрицу направляющих косинусов, позволяющую преобразовать компоненты вектора, заданного в локальных координатах, в глобальную систему координат:
 ,
,
( 4.23)

( 4.24)
где нижний индекс показывает, в какой СК определены компоненты вектора а: g соответствует глобальной, а l – локальной координатным системам (ГСК и ЛСК). Для установки связей между КЭ в ансамбле определим матрицы взаимной ориентации векторов:

( 4.25)
что соответствует пересчету компонент вектора из ЛСК элемента n в ГСК, а затем – из ГСК в ЛСК элемента m.
Это преобразование справедливо для компонент векторов перемещений, сил и моментов. Для преобразования углов поворота нормали вспомним, что углы поворота предполагаютмя малыми; тогда их можно ассоциировать с единичным вектором малого поворота трехгранника Дарбу, определенного в одном из узлов КЭ:

( 4.26)
и преобразовывать его компоненты по формуле ( 4.23). Суммарный поворот (конечно, только при малости углов) можно представить вектором

( 4.27)
и тогда пересчет углов поворота осуществляется по той же формуле ( 4.23).
Вектор узловых перемещений в локальных координатах представляется в виде:
 ;
;
его преобразование осуществляется с помощью блочно-диагональной матрицы, составленной из матриц взаимного поворота:

( 4.28)
Матрицы жесткостей и масс для пространственного КЭ имеют вид, известный из литературы:


 ( 4.29)
( 4.29)
где

( 4.30)

( 4.31)
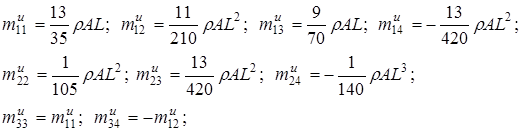
( 4.32)
Приведенные формулы составляют математическую модель конечного элемента в виде прямого стержня постоянного сечения, произвольно ориентированного в пространстве.
Объединение таких конечных элементов в ансамбль, т.е. получение матрицы жесткости и матрицы масс ансамбля КЭ, осуществляется стандартным алгоритмом МКЭ, программы, реализующие который в математическом пакете MathCad 7.0 Pro, приведены в приложении.
|
из
5.00
|
Обсуждение в статье: Сетка конечных элементов для витка пружины |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы