 |
Главная |


Автоматизированные системы плазовых работ
|
из
5.00
|
С появлением и развитием вычислительной техники стали использовать аналитические методы для проектирования формы корпуса судна и для выполнения плазовых работ.
В Российском и зарубежном судостроении разработаны и применяют системы автоматизированного проектирования судов (САПР). В состав этих систем входят подсистемы, решающие плазовые задачи математическими методами на основе математических моделей формы и конструкции корпуса судна. Подсистемы содержат модули, каждый из которых решает определенную задачу.
В России для автоматизированного решения плазовых задач используются отечественные системы, например, РИТМ-Судно и зарубежные системы FORAN, TRIBON, CATIA, AVEVA.
Плазовые модули всех систем решают идентичные задачи и выдают аналогичные результаты. Они различаются применяемым математическим аппаратом и структурой программного обеспечения.
Принципиальная структура модулей автоматизированной системы решения плазовых задач, присущая большинству существующих САПР судов, содержит:
- банк исходных данных (исходной информации);
- математическую модель (систему математических уравнений, описывающих геометрию корпуса);
- математический метод (алгоритм) решения задачи;
- программы решения задачи;
- расчетные материалы и алгоритмы для решения задач;
- результаты решения;
- графические и текстовые представления результатов решения, выполняемые чертежными машинами и печатающими устройствами.
Модулями подсистемы плазовых задач рассчитываются и вычерчиваются:
- теоретическая форма корпуса (генерируются его теоретические обводы и вычерчивается теоретический чертеж);
- положения теоретических линий пазов, стыков наружной обшивки, поперечного и продольного набора (генерируются его теоретические линии и вычерчивается практический корпус);
- контуры и размеры плоских деталей и разверток гнутых деталей корпусных конструкций и вычерчиваются эскизы деталей и разверток;
- раскрой листового и профильного проката и вычерчиваются карты раскроя;
- разрабатываются корпусные конструкции и вычерчиваются корпусные сборочные чертежи;
- контуры и размеры гибочных шаблонов для проверки формы изогнутых деталей в процессе их гибки;
- контуры и размеры оснастки, необходимой для сборки и проверки корпусных конструкций и корпуса в целом;
- управляющие программы тепловой резки листового проката для машин с ЧПУ.
Для расчета формы и размеров деталей корпуса необходимы дополнительные исходные данные о конструкциях корпуса, положении палуб и переборок, продольного и поперечного набора, форме оконечностей, размерах связей. Данные берутся из рабочих чертежей или из современных САПР, в которых имеются модули, проектирующие и вычерчивающие конструкции корпуса.
Плазовые работы начинаются с построения судовой поверхности формы корпуса судна.
Исходными данными для генерирования теоретической формы корпуса судна служат главные размерения судна, проектные характеристики формы корпуса (коэффициенты полноты, погибь бимсов, седловатость палуб и другие).
Форма корпуса судна может быть представлена в аналитическом виде как математическая модель. Применяются три формы математических моделей: цифровая, аппроксимационная и чисто математическая.
В цифровой модели обводы корпуса представляются в виде таблиц ординат к теоретическому чертежу и практическому корпусу (плазовая книга). Аппроксимационная модель задает обводы в виде семейства математических кривых, коэффициенты которых определяются по данным цифровой модели. Чисто математическая (каркасная) модель – это семейство уравнений кривых и поверхностей корпуса, задаваемых в процессе формирования этой модели.
В аппроксимационной модели одной из основных задач построения обводов корпуса является трассировка - определение координат точек пересечения пазов и теоретических линий продольного набора с линиями шпангоутов. Для решения этой задачи необходимо знать уравнения линий шпангоутов и продольных теоретических линий пазов и набора.
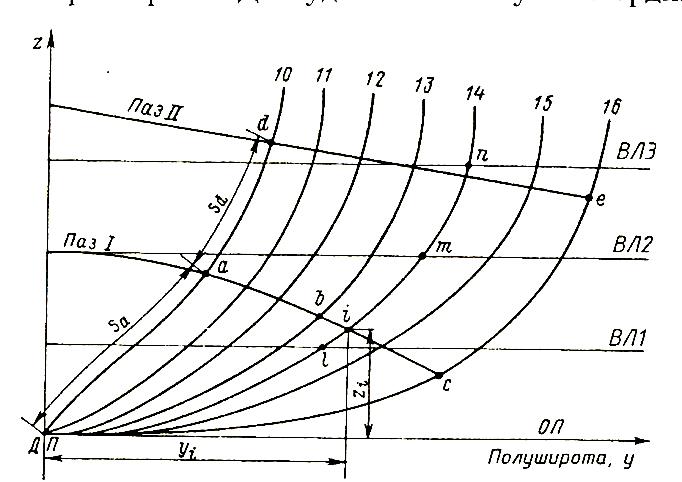
Рис. 2.11. Фрагмент проекции «корпус» с прямолинейным
и криволинейным пазами.
Уравнения шпангоутов задаются в виде параболы

Уравнение криволинейного паза

Уравнение прямого паза

Для нахождения коэффициентов в уравнениях необходимо определить координаты четырех точек, принадлежащих шпангоуту (l, i, m, n) , а также точек криволинейного паза (a,b,c) – см. рис.2.11.
Для прямолинейного паза
При задании точек пересечения в виде криволинейных координат длинами дуг  при нахождении координаты y необходимо определить значение
при нахождении координаты y необходимо определить значение
Координаты у точек а, в, с определяются как верхний предел этого интеграла, по которому определяется длина дуги шпангоута между пазами 
При построении практического корпуса на основе математической модели выполняется согласование и сглаживание обводов корпуса с использованием разностей таблично заданных функций или кубических сплайнов.
Согласование и сглаживание теоретических кривых обводов корпуса при задании теоретических кривых в виде цифровой таблично заданной функции можно выполнить по математическому аппарату конечных или разделенных разностей, которые по своим свойствам аналогичны свойствам производных. Конечная разность - это разность цифровых значений координат рядом расположенных точек кривых обводов корпуса.

Разделенная разность представляет отношение конечных разностей координат рядом расположенных точек на кривой точек.
Для ватерлиний или шпангоутов с равноотстоящими полуширотами применяются конечные разности, а с не равноотстоящими полуширотами – разделенные разности.
Конечные разности используются для оценки плавности кривых обводов корпуса по следующим критериям:
-первые и вторые разности должны плавно возрастать или убывать;
-вторые разности не должны менять знака.
В том случае если вторые разности возрастают или убывают монотонно, то это свидетельствует о наличии скрытой волнистости линии обвода корпуса.
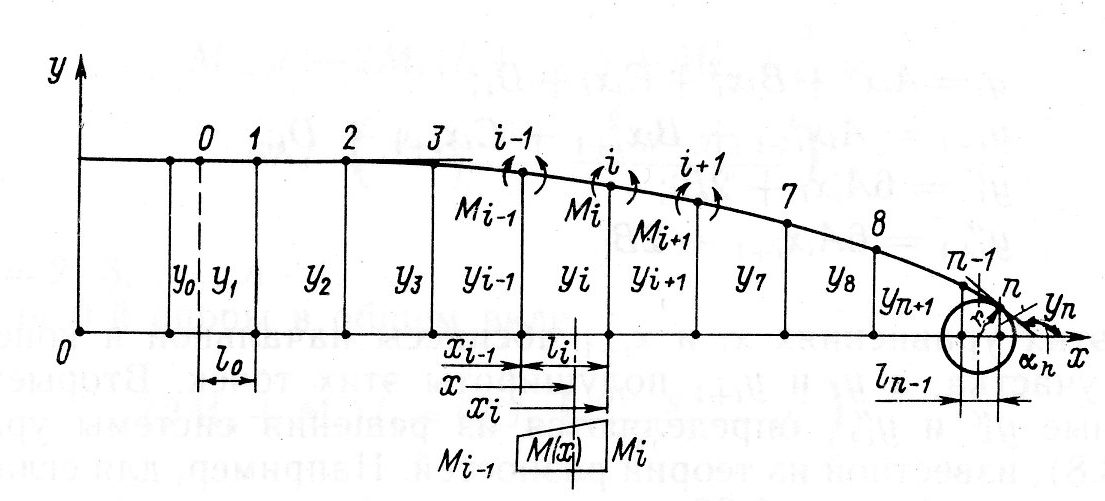
Рис. 2.12. Носовая ветвь ватерлинии.
Согласование и сглаживание обводов с использованием кубических сплайнов основано на физической аналогии пружинения участков гибкой рейки, не лежащих на плавной кривой, при снятии того или иного груза прижимающего рейку к основанию. Для участков рейки, лежащих на плавной кривой, величина пружинения равна 0, а на других участках – равна ±εi. Для определения этой величины рассматривается многопролетная балка постоянного сечения со смещенными абсолютно жесткими опорами, нагруженная внешней нагрузкой. Для этой балки составляется система уравнений трех моментов.
Для i-ой опоры:

Для нулевой опоры:
 -
- 
Для n -ной опоры

Ватерлиния в точке 0 плавно сопрягается с участком цилиндрической вставки и  . В точке n производная
. В точке n производная  . Эти граничные условия соответствуют жесткой заделке изогнутой по ватерлинии рейки на крайних опорах. Поскольку на каждом участке изгиба прогибы рейки малы по сравнению с длиной, то кривизна рейки (линии ватерлинии) в каждой точке
. Эти граничные условия соответствуют жесткой заделке изогнутой по ватерлинии рейки на крайних опорах. Поскольку на каждом участке изгиба прогибы рейки малы по сравнению с длиной, то кривизна рейки (линии ватерлинии) в каждой точке 
Значение изгибающего момента 
Для тонкой рейки можно принять  . Тогда
. Тогда  . Это означает, что вторая производная от упругой линии рейки в каждой точке равна изгибающему моменту или кривизне в этой точке. При отсутствии в пролетах рейки внешней нагрузки и пренебрегая силами трения можно считать, что моменты вдоль пролетов изменяются линейно и тогда для любого сечения на участке i-1, i значение
. Это означает, что вторая производная от упругой линии рейки в каждой точке равна изгибающему моменту или кривизне в этой точке. При отсутствии в пролетах рейки внешней нагрузки и пренебрегая силами трения можно считать, что моменты вдоль пролетов изменяются линейно и тогда для любого сечения на участке i-1, i значение  можно записать как
можно записать как

Дважды интегрируя это уравнение с учетом граничных условий, получим уравнение изгиба рейки на участке  ,
,  –кубический сплайн.
–кубический сплайн.

Количество таких уравнений равно количеству участков рейки.
Для получения окончательного решения уравнения изгиба рейки необходимо проверить плавность линий на соблюдение условий монотонности вторых производных 
 >
>  >
>  .…
.…  >
>  >
>  ….
….  >
> 
Сглаживание ватерлиний состоит в следующем:
-по начальным значениям полуширот  , взятым из таблицы ординат, и заданным граничным условиям и
, взятым из таблицы ординат, и заданным граничным условиям и 
- решается система уравнений трех моментов и определяются все значения  в первом приближении.
в первом приближении.
В том случае если некоторые имеют знаки, обратные остальным , и не выполняется условие монотонности, то вносятся поправки в величины , чтобы это условие выполнялось и знаки были одинаковыми. Принимая новые сглаженные значения и оставшиеся неизменными значения остальных  вычисляются новые величины полуширот
вычисляются новые величины полуширот  из решения откорректированной системы уравнений трех моментов при неизменных значениях
из решения откорректированной системы уравнений трех моментов при неизменных значениях  и
и  и известных значениях
и известных значениях  . Полученные при решении новые значения полуширот cравнивают с исходными. Их отличие не должно превышать ранее установленного значения поправки ±εi .
. Полученные при решении новые значения полуширот cравнивают с исходными. Их отличие не должно превышать ранее установленного значения поправки ±εi .
Сглаживание шпангоутов и батоксов выполняется аналогично в диалоговом режиме на ЭВМ. При этом оценивается взаимное влияние поправок, вносимых в значение ординат, на гладкость всех кривых.
После сглаживания ватерлиний определяются окончательные значения и составляются уравнения изгиба кривых для каждого участка ватерлиний, по которым определяются значения полуширот yi.
|
из
5.00
|
Обсуждение в статье: Автоматизированные системы плазовых работ |
|
Обсуждений еще не было, будьте первым... ↓↓↓ |

Почему 1285321 студент выбрали МегаОбучалку...
Система поиска информации
Мобильная версия сайта
Удобная навигация
Нет шокирующей рекламы